Variare la velocità di una
ventola a 4 fili.
|
Può essere necessario regolare la velocità delle ventole a due e tre
fili per PC , principalmente per ridurne il rumore. Un controllo PWM
di queste ventole non è per nulla indicato (data la loro particolare tecnica
costruttiva), anche perchè rischia di aumentare, invece che diminuire, il
rumore prodotto.
Usando un PWM, inoltre, si avrebbe la
corrente pulsante di alimentazione per tutta la lunghezza del cavo di connessione tra ventola e
scheda madre, con un evidente aumento dei disturbi elettromagnetici indotti
all' intorno.
L'unica via percorribile è quella di variare la tensione di alimentazione,
che potrà oscillare tra metà e il massimo valore nominale. Però, a tensione
bassa, con la velocità diminuisce anche la potenza, ovvero la possibilità di
muovere aria. Al di sotto di metà tensione, poi, è molto probabile che la
ventola si arresti. Inoltre, dato che la regolazione si effettua con
facilità con un transistor in serie, non sarà possibile raggiungere la
tensione nominale data la cdt introdotta dalla giunzione.
Per superare questi problemi, da un certo tempo sono state introdotte ventole a 4 fili,
che implementano un controllo
di velocità PWM interno alla ventola stessa.
La loro struttura è la seguente:
 |
- sulla scheda madre è installato un integrato
dedicato che funge da controller della ventola attraverso un segnale
PWM
- la ventola fornisce al controller sulla scheda madre il segnale
tacho proporzionale alla velocità di rotazione
- il controller rileva il segnale tacho e risponde inviando alla
ventola un PWM secondo una curva impostata, in
funzione della temperatura
- questo segnale PWM viene elaborato dall' integrato a bordo della
ventola e trasformato nella sequenza di impulsi necessari al comando
del motore. |
In
sostanza, il segnale PWM va ad influenzare direttamente il sistema di
controllo integrato nella ventola ed è questo a far variare la velocità.
In questo modo non si deve modificare la tensione di alimentazione (con i
problemi precedentemente indicati), nè tanto meno si deve modularla con un PWM,
cose che richiederebbero un elemento di potenza per la corrente necessaria alla
ventola.
Per
la ventola a 4 fili, il segnale PWM sul cavo:
- è a livello logico e quindi minimizza i disturbi
- non si richiede corrente a impulsi sul cavo
- la frequenza di
commutazione può essere abbastanza elevata da evitare riflessi sulla banda
udibile.
Inoltre, l'azione diretta sul
controller della ventola consente una regolazione di
velocità fluida e senza aumento del rumore e impedisce fenomeni di stallo.
Dal
punto di vista realizzativo
resta del tutto invariata la struttura a quattro espansioni polari
caratteristica di queste ventole, il che permette ai costruttori di utilizzare
gran parte delle linee di montaggio esistenti, ormai ampiamente ammortizzate e
quindi sorgenti di utile. Viene però sfruttato il lato
componenti per inserire gli elementi necessari, forzatamente smd per la
piccola superficie disponibile
 |
A
parte il numero elevato di componenti, si vede subito il "grosso"
chip IC1 a più pin, che è il controller vero e proprio.
Da notare i pin più ampi ad una estremità e che servono al
raffreddamento dei transistor di potenza interni che comandano la
corrente al motore
IC2 è il sensore Hall.
Sulla sinistra si notano i 4 fili di collegamento
con l'esterno.
|
Possiamo anche dare uno sguardo alla struttura logica di uno di questi integrati,
realizzati appositamente per questa applicazione, ad es. BD6709 di Rhom o
LP11961 di Sanyo, tanto per citarne due comuni:
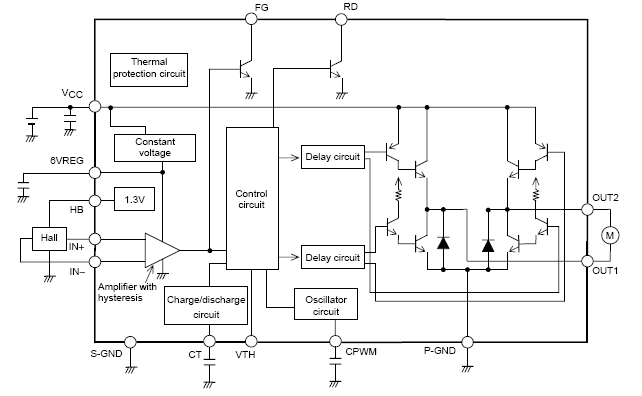
Osserviamo
che il motore è comandato da coppie di darlington che dipendono dal segnale PWM che viene inviato sul quarto filo;
questo segnale agisce all'interno del
sistema di controllo della velocità della ventola, il che consente una
variazione da 0 al massimo numero di giri, senza gravi riduzioni di potenza,
senza problemi di stallo a basso numero di giri e senza generare rumore dovuto
all' azione di un PWM applicato in modo non sincrono alla tensione di alimentazione.
Il disturbo elettromagnetico è ridotto, dato che la commutazione
avviene all'interno della ventola, negli avvolgimenti che risultano abbastanza
schermati dal magnete a campana del rotore.
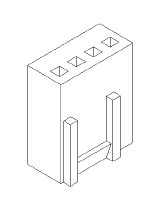
Il
connettore unificato per le ventole PC è un Molex a 3 poli, ai quali si
aggiunge il quarto del PWM.
| Pin |
Funzione |
Colore del cavo |
Connettore MOLEX |
| 1 |
GND |
Nero |
 |
 |
| 2 |
12V |
Giallo o Rosso |
| 3 |
Tacho |
Verde o Bianco |
| 4 |
PWM |
Blu |
I colori dei cavi possono variare da un costruttore all'altro.
Far variare la velocità di queste ventole è estremamente semplice: basta
applicare un segnale quarto filo.
Questo è un PWM a livello logico, con una frequenza nominale di 25kHz.
Questo si ottiene, ad esempio, con un semplice circuito astabile basato sul solito 555.

Il diodo D1
amplia
il range del duty cycle. Dato
che nella fase di carica interviene anche la tensione di conduzione di D1, è
opportuno mantenerla più bassa possibile. Si possono usare benissimo diodi
correnti, genere 1N4148, ma uno Schottky con bassa tensione di conduzione
consente una migliore linearità. Tra l' altro, questi piccoli diodi sono
comuni sulle schede SMD; l' unico problema sono le dimensioni estremamente
piccole (solitamente SOD-323 e simili) che ne rendono non semplice la
manipolazione.
Per componenti su foro, i piccoli diodi della serie BAS sono adeguati.
Dato
che sono da considerare abbastanza leganti le resistenze R1, R2 e R3, se si
vuole realizzare un variatore con duty cycle 1-99%, occorre un rapporto 100:1
tra la resistenza variabile e le altre due per ottenere un DF tra 1% e
99% e anche R1= R2 per la simmetria degli estremi del range. Limitare
il range sarà in ogni caso possibile variando i valori delle resistenze.
Non
è possibile eliminare nè R1, nè R2. In particolare non si può omettere la
R1dato che, come abbiamo detto, con il cursore 2 tutto verso il terminale 1,
si cortocircuiterebbe il pin 7 alla tensione positiva. Il valore scelto di 1K fa passare 12 mA @ 12V, il che rientra nelle
possibilità del transistor. Valori minori non portano particolare vantaggio,
mentre valori maggiori sono possibili. Altrettanto per la R2 che costituisce
il limite del circuito di scarica. Nelle prove è stato scelto
R1=R2=1K e R3=100k, in quanto valori facili da recuperare. Si possono comunque
usare anche altri valori; una nota del costruttore del chip riporta che (anche se non verificato in
nessuna delle prove fatte) è possibile sia necessario avere R2 > 2k7 per
assicurare l' oscillazione, ad esempio R1=R2=5k e R3=500k e così via,
aggiustando C1 per la frequenza voluta, che è f= 1.44 / [(R1+P1+R2)*C1].
Peraltro, R1 può assumere un valore diverso da R2 e R3 altrettanto: questo ha
come solo risultato un più o meno ampio restringimento del campo di
variazione del duty cycle.
La
frequenza del PWM, secondo le specifiche previste per le ventole a 4 fili è
di 25kHz nominali e sono adeguati valori tra 21 e 28kHz. Per ottenere una
frequenza adeguata C1 sarà nel range tra 680 e 750pF.
Questo valore non è tassativo, in quanto il controller della ventola è in
grado di accettare anche valori abbastanza diversi da quelli nominali; quindi, condensatori
ceramici da 820pF o anche 1nF sono più che adatti.
Il segnale PWM, secondo le specifiche , deve avere un valore massimo di 5.5V. Dato che
alimentiamo tutto alla tensione di 12V occorre ridurre l'
uscita 3 del 555 con una rete costituita da R4 e uno zener da 1/4W da 5.1V.
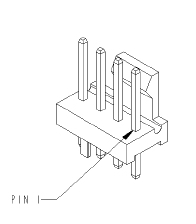
La ventola a 4 fili è collegabile al relativo connettore, mentre la
tensione di alimentazione è introdotta con un connettore analogo a quello
usato dalla ventole a tre fili e facile da recuperare in PC usati.
Il segnale tachimetrico è riportato tra i due connettori in modo da poter
essere utilizzato all'interno di un PC, collegando il connettore di
alimentazione alla scheda madre.
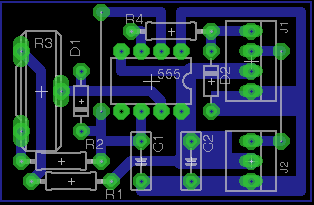
La realizzazione è semplice, bastando il solito circuito stampato mono
rame, realizzabile in casa senza difficoltà.:
Il file in Eagle 7.10 è scaricabile
qui.
Però, dati i pochi componenti usati, è possibile senza difficoltà una
realizzazione su basetta millefori.
Questo è un prototipo, poggiato su una ventola da 120mm:
Documentazione
Philips
AN170: NE555 and NE556 applications
Form Factors.org: 4-Wire Pulse Width Modulation
(PWM) Controlled Fans
|