La connessione SPI
SPI
(Serial
Peripheral Interface) è uno standard per lo scambio dati con una
interconnessione seriale sincrona del genere Master-Slave.
SPI è inizialmente stato studiato da Motorola e diventa Microwire per
National Semiconductors. Esistono poi una estensione QSPI (Queued Serial Peripheral
Interface) e un MicrowirePLUS.
Il Master è il dispositivo che comanda il sistema; in generale si tratterà
di un microcontroller.
Esso ha la possibilità di inviare e ricevere dati e comandi e di iniziare la
sessione di trasmissione. Fornisce anche il clock di sincronismo dello scambio
di dati.Lo Slave è un dispositivo periferico che può ricevere e inviare dati,
ma non può inviare comandi, nè iniziare una sessione di trasmissione. Il
clock con cui trasmette o riceve dati è in ogni caso fornito dal
Master e lo Slave non ha alcun controllo sul questa linea.
E' possibile collegare più Slave ad uno stesso Master, ma nel sistema SPI non
sono previsti più Master sullo stesso circuito dati.
Il protocollo SPI è molto semplice, dato che non prevede situazioni
di arbitraggio multi-Master, nè segnali di handshake. E, in effetti, lo
standard SPI non ha una vera definizione formale, ma è piuttosto una serie di linee guida
che i costruttori seguono. Questo rende SPI molto flessibile, ma anche molto
variegato.
Si possono fare rientrare nella "categoria" SPI tutti quei
dispositivi che sono costituiti essenzialmente da uno shift register. E, in pratica, proprio shift register del genere LS/HC164, 594/5 e
CD4094 sono un esempio di periferica SPI minimale.
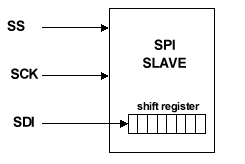 |
L' hardware della comunicazione è costituito da una linea dati chiamata SDI (Serial Data Input) e
da una di clock SCK (Serial ClocK), per cui una
periferica SPI può essere considerata analoga ad uno shift
register del genere SIPO (Serial In-Parallel Out).
La periferica, o Slave, dispone solitamente di un sistema di chip select
che il Master dovrà comandare per attivare la comunicazione (linea SS
o CS).
|
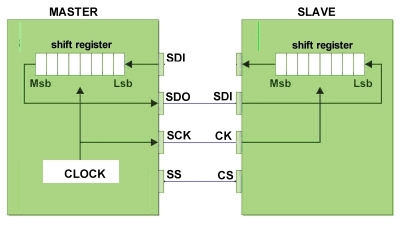
Da parte sua il Master è essenzialmente uno shift register di tipo PISO
(Parallel In-Serial Out).
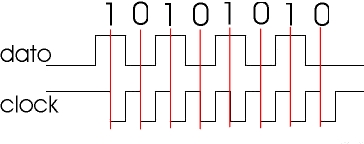 |
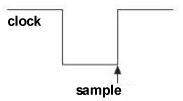
Il dato viene posto sulla linea di trasmissione, un bit per volta,
partendo da quello più significativo (MSb).
Per ogni bit, viene inviato un impulso di clock su cui sarà
sincronizzata la ricezione.
Nel diagramma, come esempio la trasmissione del byte 10101010 con
clock sul fronte di discesa. |
Non è determinato il fronte di sincronismo del clock, che, a seconda della
periferica, potrebbe essere anche quello di salita; e neppure lo stato della
linea di clock quando è inattiva. Nel diagramma è a livello alto, ma
potrebbe anche essere l' opposto. Queste opzioni sono descritte più avanti.
Non esiste alcun particolare handshake per la trasmissione che parte quando
il Master seleziona lo Slave con cui vuole colloquiare, attraverso il suo chip
select ed il successivo invio del clock secondo cui fare scorrere i dati tra
gli shift register.
La più semplice simile configurazione necessita solamente di dati in partenza dal Master e
in arrivo allo Slave, ma sono state
realizzate un gran numero di altre funzioni, anche complesse (EEPROM, RAM, FLASH, AD, RTC,
codec, ecc.), che devono inviare dati e rispondere a comandi.
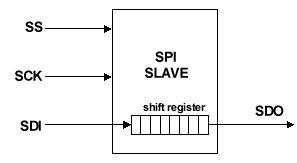 |
Poichè la linea SDI è mono direzionale, lo standard aggiunge una
linea SDO che la periferica usa per trasmettere verso il Master. Se facciamo riferimento
ad un generico shift register, la
linea SDO sarebbe collegata al pin Qn di uscita del
registro.
In pratica, quindi, una periferica SPI minimale trasmette il
contenuto del registro shiftandolo sulla linea SDO mentre dall'
altro estremo lo con i dati in arrivo. |
Il fatto che le linee SDI e SDO siano mono direzionali
permette di realizzare sistemi in cui entrambe siano attive
contemporaneamente, realizzando una comunicazione full duplex: mentre
arrivano dati dal Master sullo SDI, lo Slave invia altri dati sullo SDO.
Questo richiede una certa complessità di registri, buffer e sistemi di
controllo all' interno dei dispositivi SPI.
SPI può operare a
frequenze di clock molto elevate, anche oltre 10 MHz. La frequenza del clock
dipende in parte dalle caratteristiche della periferica, ma molto dalla
qualità del collegamento fisico tra questa e il Master.
L'ambito di SPI è, in realtà, assai vario, in quanto sono disponibili
moltissimi tipi di periferiche, da quelle più semplici a quelle più
complesse, come AD/DA multi canali, RTC, interfacce con altri bus (LAN, CAN,
ecc), termometri, codec, ecc.
 |
Alcune di esse rispondono a un set di
comandi, inviando dati propri, oppure hanno pin addizionali che permettono di
implementare funzioni complesse nello scambio dei dati.
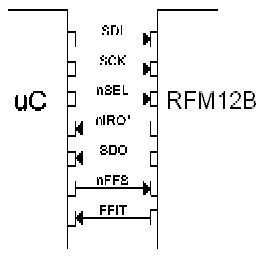
Ad esempio in figura l' ISM band transceiver
module RFM12B, un modulo di comunicazione radio con interfaccia seriale
sincrona SPI. Ai segnali standard sono aggiunti quelli relativi alle
funzioni del modulo.
Con componenti come questo, la comunicazione sarà gestibile dai moduli sincroni integrati nei
microcontroller, mentre occorrerà del software ad hoc per gestire le funzioni
addizionali. |
Esisto poi numerosi dispositivi simil-SPI, nel senso che scambiano dati
secondo lo stesso principio di una linea dati sincroni con il clock su un'
altra linea, ma che possono non corrispondere alle altre specifiche del bus
definito da Motorola.
La connessione SPI
In ogni caso, la connessione SPI è definita per un minimo di 4 conduttori
fisici:
- SDO - o MOSI oppure SIMO, linea di uscita dei dati dal Master e
ingresso per lo Slave
- SDI - o MISO oppure SOMI, linea di ingresso dei dati nel Master e
uscita per lo Slave
- SCK - clock di sincronismo della trasmissione generato dal Master, anche
indicato come SCLK o SCL o CK
- SS - Slave Select, anche indicato come CS (Chip
Select) che, a livello basso, abilita la
periferica allo scambio dei dati.
I documenti di Motorola aggiungono anche:
- MOMI - Master Output, Master Input
- SISO - Slave Input, Slave Output
Questi sono pin bidirezionali che unificano MISO e MOSI in una unica linea.
Le denominazioni dei pin dipendono dal costruttore del dispositivo e
possono essere abbastanza varie da dare origine a confusioni.
| SCLK |
SCK, CLK, CK |
| MOSI |
SDI, DI, DIN, SI |
| MISO |
SDO, DO, DOUT, SO |
| SS |
nCS, CS, CSB, CSN, nSS, STE |
 Note:
Note:
- Esiste in pratica una notevole indeterminatezza nei termini SDI e
SDO tipici dei PIC in
quanto hanno funzione opposta a seconda siano sul Master o sullo Slave. Meglio
paiono gli acronimi MISO (Master Input-Slave Output) e
MOSI (Master Output-Slave Input), che sono quelli
usati dallo standard.
- Da notare che esiste anche una soluzione SPI 3-wires, con una
sola linea dati bi-direzionale, definita SISO, che trasporta
i dati in entrata e in uscita su un unico conduttore. Analogo è I2S.
Questa modalità normalmente non è
supportata dai moduli di comunicazione sincrona dei microcontroller, ma può essere facilmente
implementato via software.
|
Di base, il collegamento tipico tra Master e Slave SPI è questo:
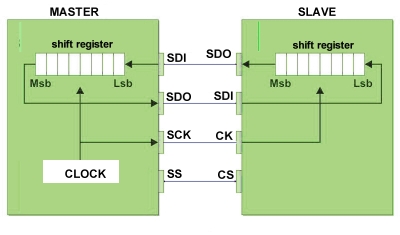 |
semplificando, si tratta di uno scambio
di dati tra shift register, il cui clock è sotto controllo esclusivo
del Master.
| Questo vuol dire che se lo Slave
deve trasmettere dati, sarà compito del Master inviare il
clock necessario. |
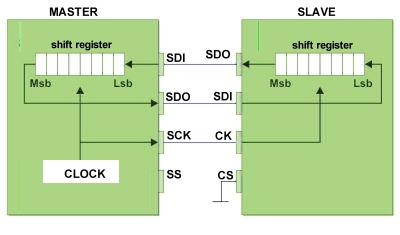
Osserviamo che In un collegamento
completo si realizza un "anello" in cui la linea SDO del Master invia dati
all' ingresso SDI dello Slave e la linea SDI del Master riceve dati dallo
SDO dello Slave.
In questo senso, un dispositivo SPI completo non è
un solo ricevitore o solo trasmettitore, ma entrambi. |
Inoltre il dato in ritorno consente al Master di
verificare che lo Slave è attivo.
Se la linea SDO dello Slave è collegata allo SDI del Master, questo
riceverà dati fino a che genererà impulsi di clock. Se i dati in arrivo non
interessano, saranno scartati, ma, ripetiamo, se il Master vuole ricevere dati
dallo Slave, deve inviare impulsi di clock, dato che lo Slave non dispone di
clock proprio per la comunicazione; in questo caso il Master porrà sulla
linea dati un valore "dummy", tipicamente 0 o 1, che lo Slave a sua
volta scarterà, essendo posto nello stato di trasmissione.
E' comunque necessario considerare le specifiche di ogni periferica, dato che alcune sono in grado di operare in
full duplex, ovvero ricevere dati e nello
steso tempo trasmetterne altri, utilizzando sistemi interni di buffer.
Altri esempi di connessione SPI riguardano periferiche che hanno
caratteristiche particolari.
A questo proposito si deve tener presente che una trasmissione sincrona
composta da dato e clock è uno dei metodi più semplice ed efficaci per lo
scambio di dati. Ne consegue che un elevato numero di periferiche utilizzano
questo sistema, anche se non sempre sono considerabili come veri SPI, anche
se, con opportuni adeguamenti software e/o hardware, è possibile inserirle in
bus SPI.
Di questa categoria fanno parte molti dei dispositivi chiamati 2-wires o
3-wires, dove, ad esempio, la linea dati diventa bi direzionale o la lunghezza
del dato è maggiore di 8 bit.
 |
Ad esempio l' accelerometro
digitale ADXL345 di Analog Devices può operare sia con la
connessione standard a 4 fili (SDI e SDO), ma anche a tre fili, dove
il pin SDI diventa un SDIO bidirezionale.
Tra l' altro la stessa periferica può essere configurata per
comunicare anche in I2C. |
Per contro, altre periferiche richiedono un adeguamento più massiccio per
essere usate con interfacce SPI.
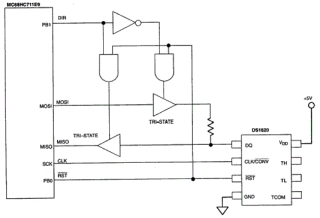 |
Ne è un esempio il sensore di temperatura DS1620, in cui:
- la linea dato DO è bi direzionale
- la lunghezza del dato di temperatura reso è a 9 bit invece che
8.
- il chip select RTS è valido a livello alto
Un adattamento allo standard Motorola SPI richiede un hardware
addizionale per adeguare i segnali.
L' AN85
di Maxim da cui è tratta l' immagine, dettaglia i
particolari dell' intervento e della gestione software. |
E, in effetti, è importante rilevare la lunghezza del dato richiesto o fornito
dalla periferica, in quanto il "byte" di 8 bit può non essere l'
unica dimensione possibile, tanto che alcune periferiche possono avere
lunghezza dati variabile a seconda delle operazioni.
Dal punto di vista della
trasmissione e ricezione, questo comporta una diversificazione degli
algoritmi, con la fornitura del numero adeguato di impulsi di clock e la
gestione dei buffer che, nei moduli integrati nei microcontroller, hanno
solitamente la lunghezza standard di 1 byte= 8 bit.

Per quanto detto, e quanto indicato più avanti per le connessioni
multi-Slave e le polarità del clock, è indispensabile consultare
con cura i fogli dati delle periferiche utilizzate, onde risolvere
eventuali incompatibilità dirette nella configurazione che si è
prevista. |
Ne risulta che in alcuni casi è più semplice emulare via software la
connessione simil-SPI tra microcontroller e periferica piuttosto che
utilizzare i moduli di comunicazione seriale sincrona integrati.
I moduli di comunicazione sincrona
Un drive per shift register può essere scritto con semplicità per
qualsiasi microcontroller, ma clock elevati e trasmissioni full duplex
costituiscono situazioni gravose da emulare in software.
Per evitare questo carico all' utente, nei principali microcontroller viene
integrata una periferica specifica per la comunicazione SPI, dotata di
meccanismi di buffer e di flag per la gestione sia in polling che in interrupt.
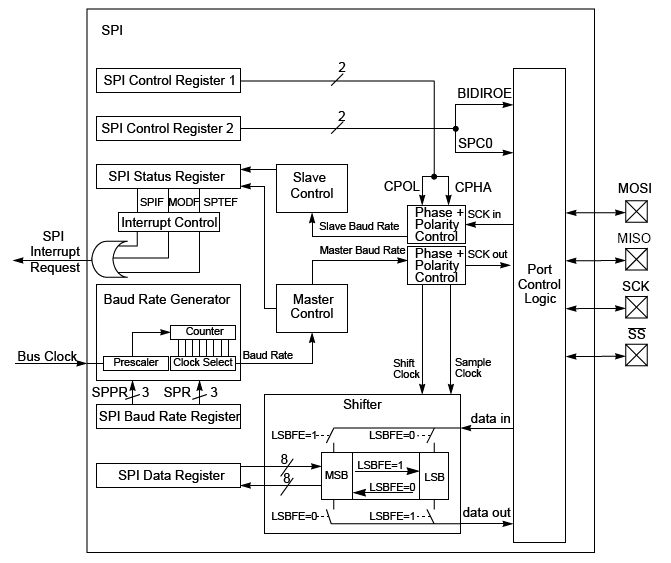
L' architettura di un modulo di gestione SPI è presentata nel documento
Motorola S12SPIV3/D, SPI Block Guide V03.06, di cui si consiglia la
consultazione per un maggiore approfondimento sulle caratteristiche del
bus.
da cui possiamo notare la complessità che non si limita ad un solo
registro di spostamento, comprende una complessa struttura di gestione dello
shift register e delle polarità del clock per consentire una comunicazione
interamente automatizzata anche nel caso di un full-duplex.
I moduli integrati nei microcontroller ricalcano questa struttura, ma possono
non essere esattamente identici, per cui occorrerà, prima di utilizzarli,
documentarsi sui fogli informativi.
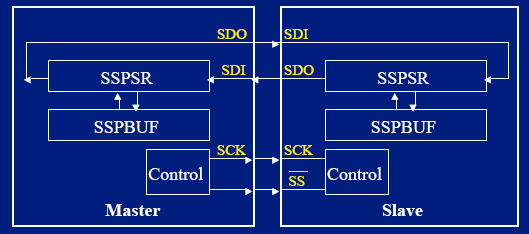
Nel modulo di gestione
seriale sincrona tipico di un microcontroller, per i PIC chiamato MSSP o SSP
(Master Synchronous Serial Peripheral o Synchronous Serial
Peripheral), sono presenti, oltre agli shift
register (SSPSR nell' immagine sotto), anche dei buffer (SSPBUF nell' immagine) per conservare il dato ricevuto.
Una struttura bufferata è indispensabile alla gestione di trasmissioni che
possono raggiungere velocità molto elevate, onde dare tempo al
microcontroller di trattare i dati ricevuti e trasmessi.
 |
Se quanto lo Slave trasmette non serve alla comunicazione, il
Master dovrà comunque effettuare la lettura del buffer e scartare
il risultato, oppure
utilizzarlo anche solo come check dell' attività dello Slave. |
Il modulo tipico, poi, contiene una logica in grado di controllare lo scambio di dati sincrono sulle linee SDO e
SDI in modo del tutto autonomo, permettendone una gestione sia in
polling che a interrupt, con vari registri preposti alle
varie funzioni della comunicazione.
Questo consente una grande flessibilità di impiego, potendo soddisfare
anche le esigenze di scambio dati ad alta velocità che avvengono in
concomitanza con altre operazioni del microcontroller.
E' ovvio che la connessione ad anello serve solamente se occorre
ricevere dati dalla periferica.
In un sistema minimale, si potrà risparmiare un conduttore (e un pin del
microcontroller).
 |
Il segnale di selezione da inviare allo Slave, se non gestito direttamente dal
modulo, viene ottenuto da uno
degli I/O disponibili sul microcontroller che opera come Master. Microcontroller che dispongono di moduli dedicati a SPI potranno avere la
possibilità di configurare, anche opzionalmente, una linea SS.
Per alcuni moduli questa linea è valida solo in modo Slave, per altri è
utilizzabile anche in modo Master per selezionare uno Slave.
|
Nel modulo MSSP dei PIC è previsto un pin SS,
ma esso funziona come chip select del modulo stesso
esclusivamente quando
questo è programmato per operare come Slave.
Nel caso in cui il microcontroller operi come Master, il chip
select dello Slave dovrà essere ricavato da una delle linee di
I/O disponibili
|
E, come accennato prima, è necessario osservare la polarità del chip
select richiesto dalla periferica collegata, dato che generalmente si fa conto
su CS/SS valido a livello basso, ma può capitare anche l'opposto.
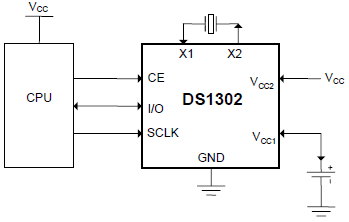 |
Ad esempio, l' RTC DS1302
di Maxim è un simil-SPI a tre fili con una linea bi-direzionale
chiamata semplicemente I/O.
E' un esempio di periferica con il chip select (CE) valido a
livello alto; tutte le linee di comunicazione sono pull down
all' interno dell' integrato.
Inoltre, nelle operazioni sulla RAM integrata, può scambiare dati
in burst. |
Quindi, di nuovo, si richiama la necessità di verificare con cura quali
segnali sono necessari per la periferica che si è scelta, dato che SPI è
uno standard molto lasco e, al di fuori dell' ambiente Motorola, ha dato
origine a una quantità notevole di dispositivi con caratteristiche molto
varie.
Un ulteriore risparmio di conduttori è possibile se non si
utilizza il segnale di selezione della periferica SS.
 |
Il segnale di selezione dello Slave può essere
omesso se il Master accede ad una sola periferica, che sarà sempre attiva
ponendo il suo chip select al livello adeguato (solitamente basso, ma può
anche essere l' opposto).
La selezione va utilizzata anche in questo caso se, in
condizioni di non-selezione, la periferica va in basso consumo ed è
necessario minimizzare l' energia impegnata.
La selezione della periferica
diventa necessaria se il Master ne controlla diverse.
|
Come regola generale, il segnale di CS dovrebbe essere
sempre usato in quanto in varie periferiche ha
funzione di ripristinare lo Slave in modo da essere pronto a
ricevere il prossimo dato. |
Con questo si intende che il chip select non solo attiva la periferica, ma
solitamente ha anche funzione di resettare i contatori degli shift register,
riallineando i registri inteni per ricevere correttamente i prossimi dati.
Multi Slave
Quanto detto è valido nel caso di un semplice sistema Master-Slave, che,
peraltro, è una delle situazioni più comuni. Ma SPI ammette anche un "bus" con più Slave.
In questo caso sono possibili due
tipi di connessione:
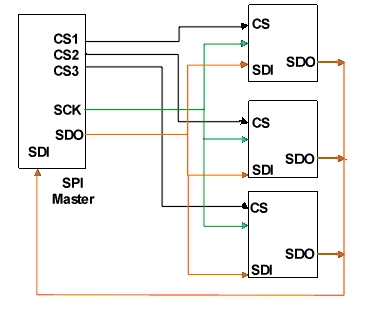 |
Una prima possibilità, di uso generale, è quella di prevedere una
distribuzione in parallelo dei segnali SDI e SDO. Il Master
comanda tante linee di chip select quante sono le
periferiche. In sostanza, si tratta di utilizzare pin di I/O del
microcontroller, comandandoli in modo da abilitare una sola periferica
per volta.
Questo sistema consente di collegare tante periferiche quanti sono
i chip select disponibili, il che può limitare le possibilità di
espansione in microcontroller con un basso numero di pin.
In genere, però, non si tratta di un grosso problema dato che è
raro che in solo Master comandi un gran numero di Slave, vista anche la
necessità di limitare a lunghezze ragionevoli i conduttori del bus
per consentire i transfer rate elevati che offre la connessione
SPI.
|
Il vantaggio principale di questa
configurazione è che ogni periferica, essendo abilitata
separatamente, potrà disporre di una gestione propria.
Sono così
mescolabili periferiche con, ad esempio, chip set validi alti e bassi
o con lunghezza di dati differente e modi di clock diversi: le periferiche non selezionate saranno disabilitate e indifferenti ai
segnali sui pin, che si troveranno in 3-state, quindi con carichi
ad alta impedenza che non influenzano il bus, permettendo al Master di
configurarsi diversamente per ognuna di esse..
Problemi, però, possono insorgere in quanto il protocollo
originale SPI di Motorola si aspetta che tutti i dispositivi Slave
utilizzino uscite MISO/DOUT 3-state, ma alcune periferiche non
hanno uscite 3-state, dato che prevedono una connessione in daisy
chain (vedi sotto). Questa architettura, rispetto alla precedente, riduce il
numero dei pin usati dal microcontrollore, perché solo una linea CS è necessaria. Poiché DOUT di ogni dispositivo è destinato a guidare il pin DIN di un altro,
deve rimanere attivo. Se l'output DOUT è andato ad alta impedenza, l'input DIN di un dispositivo di
daisy chain successivo non riceverebbe il dato circolante, bloccando
il loop.
|
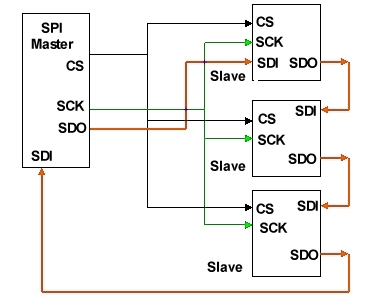 |
Il diagramma a lato presenta la soluzione con le periferiche in
daisy chain.
I dati in uscita dal master sono inviati nella prima periferica, la
cui uscita SDO è concatenata con l' ingresso della successiva e così
via, fino all' ultima la cui uscita richiude l' anello sullo SDI del
Master.
In questo caso, dato che tutte le periferiche devo essere attive
per passarsi i dati nella catena, è necessario un solo segnale di
chip select.
Questo collegamento non è possibile con tutti i tipi di
periferiche, che devono avere la stessa modalità di
funzionamento e la stessa polarità di chip select.
|
Questa soluzione è molto meno
elegante di quella possibili con il bus I2C che seleziona le
periferiche con indirizzi, ma, in alcuni casi, risolve con semplicità
il problema di comandare più periferiche uguali, come ad esempio
espansioni di I/O realizzate con catene di registri SIPO oppure di
display controller.
SPI non descrive un modo specifico per implementare sistemi multi-Master,
che, vista l' assenza di un protocollo di gestione della priorità sul bus, non
è di facile soluzione. Però alcuni dispositivi SPI possono sostenere ulteriori segnali che rendono tali
implementazioni possibili, così che, con un software opportuno, sarebbero
realizzabili sistemi del genere. Tuttavia, c'è da dire che nella pratica
situazioni multi- Master non sono comuni e, vista la loro non semplice
realizzazione, nel caso in cui questo sia necessario, sarà più opportuno
rivolgersi a standard che prevedono questa possibilità, come I2C.
Trasmissione dati in SPI
La trasmissione vera e propria avviene posizionando il bit da trasmettere sulla linea SDO
e sincronizzandolo con un impulso di clock sulla linea SCK.
Una
sessione di comunicazione si svolge in questo semplice modo:
- il Master che seleziona lo Slave con cui
vuole comunicare attraverso la linea SS. Solitamente i chip select sono a
livello basso, ma è opportuno verificare questo, dato che alcune periferiche
(ad esempio RTC) possono avere un chip select attivo a livello alto.
- Dopo questo, solitamente si posiziona una breve attesa per la
stabilizzazione o una attesa più lunga a seconda di quanto la periferica
necessita per attivarsi.
- Ora il Master genera il clock massimo che la periferica e la connessione
fisica possono supportare e inizia l' invio dei dati, ponendo sul bus per
primo il bit più significativo (MSB)
- Durante l' emissione del clock, se esiste una connessione ad anello, il
Master invia dati sulla linea MOSI e riceve quelli dalla periferica sulla
linea MISO
- Quando il clock viene sospeso, anche la trasmissione ha termine. Il
Master rimuove il chip select della periferica, disabilitandola
Si tratta quindi, come abbiamo detto, di un sistema seriale sincrono,
ma nel quale, a differenza di altri, la precisione del
clock non è fondamentale, dato che solamente un elemento del bus, il Master,
lo genera e
tutti gli Slave si sincronizzano con questo.
Teoricamente, quindi, il clock può assumere
qualsiasi valore o anche cambiare durante la trasmissione oppure essere sospeso, fermando la trasmissione
stessa che riprende
al momento del riavvio del clock. Tra l' altro, in un sistema multi-Slave
non in daisy chain il Master può utilizzare clock diversi per ogni Slave,
sfruttando quindi al massimo le loro possibilità.
La soluzione SPI è poco costosa in quanto, appunto, gli Slave non richiedono generatore di clock, ma neppure logiche
complesse per la gestione del protocollo, che è semplice, perchè basato sostanzialmente su un registro di spostamento
(shift register) del genere PISO (Parallel In-Serial Out) nell' unità che trasmette
e un SIPO (Serial In Parallel Out) in quella che riceve.
Un sistema sincrono, in questo senso, è
migliore di uno asincrono, come ad esempio RS-232, dove il clock determina la
lunghezza degli impulsi dei dati e deve quindi essere molto preciso,
richiedendo un oscillatore a quarzo ad entrambe le estremità della
connessione. In SPI non serve questa precisione ed è adeguato anche un
economico oscillatore RC. Così una comunicazione SPI emulata in software
può essere interrotta da chiamate interrupt di altre periferiche senza
pregiudicare i dati.
Abbiamo
accennato che SPI è uno standard poco costrittivo e lascia molta autonomia ai
progettisti di dispositivi, con il risultato che, in pratica, sono possibili
varie combinazioni rispetto allo stato della linea di clock a riposo (idle) ed
al fronte attivo su cui sincronizzare il dato.
Un
paio di parametri chiamati polarità clock (CPOL o CKP) e la fase del clock
(CPHA
o CKE)
determinano i fronti del segnale di clock su cui sono sincronizzati e
campionati i dati, oltre allo stato inattivo della linea del clock.
Ciascuno
dei due parametri ha due stati possibili, il che dà origine a 4
combinazioni possibili, che sono tutte incompatibili tra di loro. Quindi una
comunicazione SPI deve avere Master e Slave che impiegano lo stesso modo; se
gli Slave hanno modi diversi, il Master dovrà modificare in diverse
configurazioni per ognuno degli Slave.
I 4 modi sono identificati con un numero o una coppia di numeri.
Per CPOL = 0 il livello idle del clock è zero
- per CPHA = 0, vengono acquisiti i dati sul fronte di salita del
clock (transizione low→high) e dati sono inviati sul fronte di
discesa (transizione high→low).
Per CPHA = 1, vengono acquisiti i dati sul fronte di discesa e dati vengono
emessi su quello di salita.
Per CPOL = 1 il livello idle del clock è uno (inverso del precedente CPOL = 0)
- per CPHA = 0, vengono acquisiti i dati sul fronte di discesa e dati vengono propagati
fronte di salita.
Per CPHA = 1, vengono acquisiti i dati fronte di salita e dati vengono emessi sul
fronte di discesa.
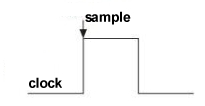
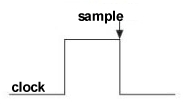
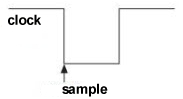
Cioè, CPHA = 0 significa campionamento (sample) sul fronte iniziale
di commutazione del clock, mentre CPHA = 1 significa campionamento sul
fronte finale del clock.
Da notare che, con CPHA = 0, i dati devono essere stabili per mezzo ciclo prima del primo ciclo di clock.
Per tutte le modalità di CPOL e CPHA, il valore iniziale del clock deve essere stabile prima
che la linea del chip select sia attiva.
I segnali MOSI e MISO sono solitamente stabili (nei loro punti di ricezione) per
metà ciclo fino al prossimo impulso di clock. Dispositivi di master e slave SPI possono
effetuare campionamenti anche in altri punti: questo aggiunge più flessibilità per il canale di comunicazione tra master e slave.
Alcuni componenti utilizzano convenzioni diverse di denominazione: ad esempio, il TI MSP430 utilizza il nome UCCKPL invece di CPOL e la sua UCCKPH è l'inverso del
CPHA.
Per i PIC CPOL è CKP (ClocK Polarity) e CPHA è CKE (ClocK Edge).
I modi di uso più comune sono 0,0 e 1,1. Quando si collegano due chip insieme,
occorre esaminare attentamente i valori di inizializzazione di fase del clock per essere sicuri di utilizzare le impostazioni
corrette.
Questa situazione da origine all' impossibilità di collegare in daisy
chain Slave che abbiamo modi diversi: nel concatenamento di Slave tutti
dovranno poter operare nello steso modo.
Nel caso invece di connessione
parallela, il Master si potrà configurare in un modo per colloquiare con il primo
Slave e in un altro modo per il secondo e così via; questo non comporta
problemi agli Slave perchè solo per volta uno viene attivato dal chip select relativo.
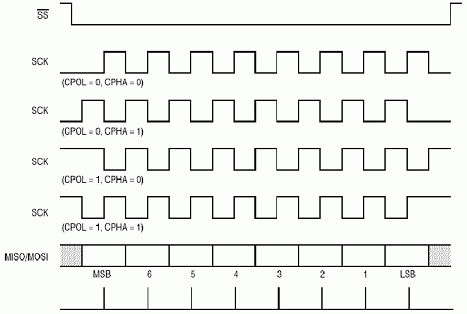 |
Nel diagramma a lato le relazioni temporali tra dati e clock, intesi
con il dispositivo selezionato con SS a livello basso.
Osserviamo che la trasmissione avviene inviando per primo il bit
più significativo (MSB - bit 7 di un byte) e per ultimo quello meno
significativo (LSB - bit 0). |
SPI
non ha un meccanismo di riconoscimento per confermare la ricezione di dati,
dato che non ha un protocollo di comunicazione particolare; così il master SPI non è in
grado di rilevare se lo Slave chiamato è efficiente, a meno di leggere un
dato in risposta sulla linea SDO.
Inoltre SPI non offre alcun controllo di flusso, dato che non ha segnali,
nè modi di handshake; dove questo sia
necessario, occorre implementare qualcosa di esterno allo standard.
Gli Slave
possono essere pensati come input / output del Master e SPI non specifica un
particolare protocollo di livello superiore, come nel caso di presenza di più
Master e della conseguente necessità di arbitraggio del bus. Il colloquio su
SPI, anche se sono presenti più Slave, è sempre inteso per una singola
coppia Master-Slave. E, in generale, un protocollo di livello superiore non è necessario,
poichè che solo i dati grezzi vengono scambiati. In
altre applicazioni dove sia richiesto un protocollo di livello superiore,
sarà necessario implementarlo al di fuori dello standard.
Connessioni SPI
Come ultima considerazione, va detto che, se, ad esempio, RS-232 è stato pensato per collegare dispositivi esterni al
sistema, SPI è pensato essenzialmente per connessioni tra componenti sullo
stesso circuito stampato o, al massimo, nella stessa apparecchiatura, quindi
su distanze limitate a centimetri o decine di centimetri: lo standard di SPI
infatti non prevede particolari connettori o cavi o terminazioni.
E' ovvio che dalla lunghezza e dalla qualità delle connessioni tra Master e
Slave dipenderà la massima frequenza di clock applicabile. Per cui, anche se
alcune periferiche possono supportare clock di 50 MHz, il limite reale dipenderà dal
collegamento.
Va tenuto anche presente che i segnali sul bus SPI sono a livello logico e
bufferati solamente dalle possibilità di driving dei pin
corrispondenti.
Potrà essere utile, per bus con molti componenti, utilizzare buffer
esterni o anche linee open drain/open collector con pull-up, cosa facilmente
implementabile dato che le linee di SPI sono tutte mono direzionali.
Va prestata però attenzione perchè alcuni componenti hanno pull-down
integrati (come il già citato DS1302): in tal caso un pull-up esterno non ha
senso.
La mono direzionalità dei segnali SPI consente, dove necessario, lunghe distanze di connessione (molte
decine o centinaia di metri) utilizzando ad esempio buffer differenziali,
realizzabili con comuni componenti per TIA/EIA-422 (RS-422), TIA/EIA-485 (RS-485), EIA/TIA-644 (LVDS) o circuiti di interfaccia
compatibili con lo standard TIA/EIA-899 (M-LVDS).
La scelta di uno piuttosto che dell' altro standard di interfaccia differenziale
dipende dall' applicazione poiché ci sono diversi vantaggi con ciascuno. In generale, le parti standard RS-485 o RS-422 hanno un
trasferimento massimo di segnale di 30Mbps, uno swing di tensione più grande rispetto
ai componenti LVDS e M-LVDS e possono fornire una più ampia gamma di tensione
in modo comune. LVDS o M-LVDS producono meno EMI, consumano meno energia e
operano con transfer rate maggiori. LVDS o M-LVDS si trovano più spesso nelle applicazioni in cui la velocità è un fattore critico, mentre RS-485 o RS-422 si trovano in applicazioni dove il rumore e la distanza sono maggiori.
Con questi buffer, trasferimenti si possono raggiungere distanze di
molte centinaia di metri tra Master e periferica.
Altrettanto
semplice è l' isolamento galvanico con optoisolatori o simili.
 |
In applicazioni critiche è indispensabile aggiungere un sistema di
isolamento completo tra unità a microcontroller e periferiche remote:
questo evita i potenzialmente dannosi loop di terra, i rischi per l'
operatore e i disturbi raccolti dalle linee.
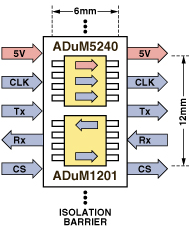
Un esempio è rappresentato da un componente specifico di Analog
Devices.
Si tratta di un integrato della serie ISO-POWER in grado di isolare
galvanicamente tutti i segnali del bus SPI, con un ingombro veramente
minimo sul circuito stampato. |
Altre varianti
Una variante di SPI è costituita dall' interfaccia McBSP (Multichannel Buffered Serial Port
) di Texas Instruments, una comunicazione seriale sincrona analoga a I2S.
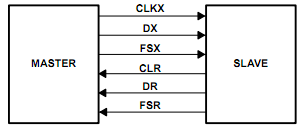 |
Il collegamento Master-Slave è illustrato nella figura a
fianco.
L'interfaccia è composta da 6 linee: clock (CLKX), trasmissione dati
(DX), trasmissione di sincronizzazione frame (FSX), clock reso (CLKR), dati
resi (DR) e sincronizzazione frame resa (FSR).
Le funzioni di McBSP sono simili a SPI. |
Entrambe le interfacce forniscono dati seriali (DX, DR) con un clock associato
(CLKX, CLKR).
A differenza della SPI, che utilizza un singolo clock, il McBSP riceve i dati con un clock separato
(CLKR) e selezionare la linea (FSR).
Le convenzioni di denominazione per McBSP sono diverse da quelle di SPI, ma si
possono raffrontare.
Nella tabella , le corrispondenze tra SPI e McBSP.
| SPI |
McBSP |
| SCLK |
CLKX |
| MOSI |
DX |
| SS |
FSX |
| - |
CLKR |
| MISO |
DR |
| - |
FSR |
I2S (Integrated Interchip Sound) è un'interfaccia elettrica seriale standard utilizzata per collegare dispositivi audio digitali. È
comunemente usato per effettuare trasporto di dati da CD a il DAC in un lettore
CD o tra AD e DA, DSP, ecc. Il bus I2S separa i segnali di clock e dati, con conseguente
connessione ajitter molto basso. Questo standard è stato introdotto nel 1986 e
ha avuto una ultima revisione nel 1996. Il bus è composto da almeno tre linee,
come uno SPI a tre fili .
Una documentazione introduttiva è disponibile
qui.
PRO SPI
- Elevata velocità di comunicazione
- Trasmissione full-duplex
- Protocollo con la massima flessibilità
- Trasferimento non limitato a 8 bit
- Struttura hardware semplice e robusta
- Bus a livello logico e basso consumo
- Nessun arbitraggio o speciali protocolli di indirizzamento e
handshake
- Clock prodotto da una sola fonte e che non richiede alcuna
precisione
- Gli Slave non necessitano di oscillatore
- I segnali sono unidirezionali e si prestano facilmente ad essere
bufferati o isolati
CONTRO SPI
- Richiede più pin che non I²C, anche nella variante "3-Wire"
- Il sistema a chip select richiede un pin per ogni Slave
- SPI è multi Slave, ma non multi-Master
- Mancano handshake sul bus per controllare il flusso dei dati, lo
stato delle periferiche e gli errori di trasmissione
- Supporta brevi distanze rispetto a RS-485, LIN o CAN-bus
- Ne esistono molte variazioni, rendendo a volte difficile il supporto
a tali variazioni
SPI
vs. I2C
Nell' ambito del trasferimento dati su corte distanze, SPI ha come diretto
concorrente il bus I2C.
Sia SPI che I2C sono standard di trasferimento dati seriali
sincroni. Entrambi sono pensati per comunicazioni su brevi distanze (stesso cs
o apparecchiatura), tra master e slave a cui sono fatti accessi intermittenti,
come ad esempio EEPROM e RTC.
SPI non è un protocollo strettamente definito e non integra meccanismi di
handshake o priorità.
Da questo punto di vista I2C è molto più "protocollo", ovvero
definisce meccanismi di handshake e di multi-Master.
Ne risulta che SPI è decisamente più semplice, tanto da poter essere emulato
via software, cosa molto più complessa per I2C.
Se entrambi hanno la possibilità di gestire più periferiche, quelle di
SPI sono solamente degli Slave e non hanno alcun potere sulla linea del clock,
mentre quelle di I2C sono più complesse, essendo sia la linea dati che quella
del clock bi-direzionali.
In questo senso SPI è decisamente migliore in fatto di semplicità di gestione e di velocità
di trasferimento dati, principalmente in applicazioni "stream", come
una comunicazione tra tra microprocessori o microcontroller e periferiche complesse,
dato che la trasmissione e la ricezione, usando due linee separate,
possono essere contemporanee (full duplex). Ad esempio tra codec e dsp, dove è richiesto un flusso simultaneo di
dati bi-direzionali, sono dotati spesso di interfaccia SPI, mentre in I2C la
bi-direzionalità della linea dati costringe ad un half-duplex.
Interfacce SPI compatibili possono operare con clock di 10 MHz (ed altre
arrivano a 50 MHz), contro i circa
4 di I2C. Questo è ulteriormente a vantaggio del bus SPI. In
questo senso SPI dovrebbe garantire un transfer rate almeno doppio di I2C.
Quando
si comunica con più di una periferica, I2C ha, però, il vantaggio di
selezionarla
con l' invio di un indirizzo sulla linea dati, il che minimizza il numero
degli I/O necessari e rende molto più elastica la gestione di un
"bus"; per contro, la necessità di inviare l' indirizzo
rallenta la comunicazione, anche se il sistema di handshake proprio di I2C
consente al
Master
di rilevare se la periferica chiamata è operativa (cosa non possibile con
SPI). In questo senso I2C è più indicato per comunicazioni in sistemi con
varie periferiche e in cui il colloquio comporta flussi di
dati più lunghi che non semplici blocchi o parole, ma quando questo è
sufficiente in un half-duplex.
Inoltre I2C dispone di un protocollo di hanshake per la
correzione di errori di trasmissione, anche se SPI può modificare la
frequenza di clock adattandola alle condizioni del mezzo di trasmissione e
della periferica collegata.
SPI non
è limitato a blocchi dati da 8 bit, così che è possibile inviare un messaggio con dimensioni
arbitrarie, in sostanza, della grandezza dello shift register. Questo da una
grande flessibilità con periferiche usano dati a più di 8 bit I2C codifica
blocchi di 8 o 9 bit, il che è meno funzionale per periferiche che scambiano
dati di 10, 12, 14 o più bit. Per
contro, richiede modifiche agli algoritmi di controllo in sistemi in cui sono
presenti Slave con parole di lunghezza diverse.
Inoltre le periferiche SPI possono utilizzare polarità e fronti del clock
differenti, per cui è necessaria una accurata verifica delle caratteristiche
dello Slave prima di inserirlo in un progetto.
L'interfaccia
SPI, di base, non richiede resistori pull-up, che si traduce in minore consumo di
energia. I2C necessita di pull-up, ma è più
semplice, avendo un minor numero di linee, il che significa che un minor numero di pin
sono impegnati dall' interfaccia. Per contro le linee sono bi-direzionali e
diventa più complesso isolarle o bufferarle quando si voglia fare assumere
loro lunghezze a cui i semplici segnali a livello logico riceverebbero una
degradazione sensibile.
I dispositivi sul bus SPI, comunicando master-slave, in catene daisy chain di
slave richiedono solitamente tante linee di chip select quante sono le
periferiche. Per contro, i dispositivi di I2C operano con indirizzi. Ne
risulta che un sistema SPI con molte periferiche richiederà più risorse
hardware, mentre un sistema I2C richiederà una maggiore complessità
software, dato che implementa un sistema di handshake.
SPI prevede un solo Master e, per le ragioni sopra elencate, è molto più
efficiente di I2C per una situazione Master-Slave, ma lo diventa meno quanto
più si aumentano gli Slave, anche se la gestione degli indirizzi penalizza il
transfer rate.
Per riassumere:
| |
SPI |
I2C |
Note |
| Topografia |
master + slave |
multi master + slave |
Multi master possibile anche in SPI, ma fuori dallo standard e non
semplice da implementare |
| Conduttori |
3-4 (+n) |
2 |
SPI richiede 1 conduttore in più per ogni chip select
di periferica |
| Trasmissione |
full duplex |
half duplex |
SPI usa linee separate per trasmissione e ricezione e consente
clock di frequenza maggiore |
| Velocità di trasmissione |
alta |
medio-bassa |
| Periferiche utili |
limitate |
molte |
In SPI la quantità di Slave collegabili dipende dalla
disponibilità di I/O per i chip select |
| Selezione delle periferiche |
chip select |
indirizzi |
| Protocollo |
semplice |
complesso |
I2C utilizza pacchetti con priorità, sistemi di arbitraggio
del bus, indirizzi di selezione delle periferiche, ecc. |
| Emulabile software |
facilmente |
non semplice |
SPI non ha un protocollo vero e proprio e si presta bene al
bit-banging di dati anche su microcontroller privi di moduli dedicati alla
comunicazione sincrona |
| Gestione del clock |
solo dal Master |
da ogni dispositivo |
La linea di clock di I2C viene gestita dal dispositivo sul bus che sta
trasmettendo. Questo richiede molta più precisione che non il sistema
implementato da SPI. |
| Buffering delle linee |
semplice |
complesso |
SPI ha linee mono direzionali. I2C ha linee bi
direzionali |
| Isolamento galvanico |
In sostanza, si potrebbe concludere che SPI sia decisamente migliore:
-
nel caso in cui ci si trovi con un solo Master e un numero
limitato di Slave (il che, in genere, è la situazione tipica di un sistema
a microcontroller)
-
quando si vuole la massima velocità di trasmissione
-
quando non si dispone di modulo di comunicazione sincrona e
si emula la connessione via software
I2C sarà necessario:
-
in sistemi multi-Master
-
in sistemi con molte unità collegate allo stesso bus
-
e, in genere, dove esiste integrato nel
microcontroller un modulo di gestione della comunicazione seriale
sincrona,
dato che una emulazione completa di I2C via software non è
semplice.
Va osservato che un tipico modulo di comunicazione seriale
sincrona integrato in un microcontroller non è una opzione trascurabile, ma un elemento di grande utilità nella
gestione delle comunicazioni sincrone; seppure esse siano emulabili da software,
il modulo dedicato consente operazioni più semplici, gestioni sia in polling
che in interrupt (indispensabili queste per applicazioni ad alta velocità o con
più task attive) oltre alla possibilità di modificare con semplici comandi il
modo di funzionamento e ottenere risultati che sarebbero assai difficili da
ottenere da una emulazione.
Questa utilità è più evidente per I2C, che
presenta maggiori problematiche a causa del protocollo più complesso, ma anche
in SPI offre soluzioni che una emulazione sarebbero quanto mai complicate, come
il full duplex.
Si deve considerare però, che un modulo può gestire un solo modo di
comunicazione per volta, dato che, in generale, fa capo agli stessi pin di I/O e che i due bus
non sono compatibili tra di loro. Quindi, dovendo disporre di una comunicazione I2C e SPI
contemporaneamente, occorrerà scegliere un microcontroller con due o più
moduli integrati. Anche se potrà essere fattibile a volte utilizzare il modulo integrato per I2C
ed emulare
SPI via software.
In tutti i casi, la scelta di uno o dell' altro dipenderà in
modo significativo dalle
periferiche che si devono collegare, anche se attualmente il mercato offre una
scelta molto ampia per cui si trovano sia in SPI che in I2C molte funzioni
analoghe.
|