L'interrupt nei PIC a
8 bit.
|
Alcune considerazioni sugli interrupt nei PIC, principalmente quelli a 8
bit.
Interrompere.
E' possibile che per una qualunque attività siano necessari eventi che richiedono una attenzione immediata.
Facendo un esempio:
stiamo leggendo un libro e siamo impegnati nello scorrere le
frasi e a comprenderne il significato (questo è il flusso principale del
"programma").
Ma ecco che improvvisamente squilla il telefono: occorre interrompere (interrupt) la lettura e
rispondere alla chiamata. Dopo di che si potrà nuovamente riprendere dal punto in cui
si è stati interrotti.
Identicamente all' esempio, il programma sta eseguendo una
procedura quando arriva un dato
da un ingresso seriale. Occorre analizzarlo ed agire di conseguenza. Il
flusso principale viene interrotto, si attiva la gestione dell'informazione
acquisita, quindi si riprende l'attività principale.
Una richiesta di interruzione viene generata quando un dispositivo
esterno all'unità logica centrale e per questo denominato "periferica", invia un segnale
opportuno. Il programma risponderà terminando l'istruzione corrente
in esecuzione e saltando (vectoring) alla routine di servizio di interrupt
(ISR - Interrupt Service Routine).
 |
In effetti, nei
PIC come in altri processori embedded, la procedura di
interrupt consiste essenzialmente nella sostituzione del valore contenuto
nel Program Counter con un indirizzo fisso, predeterminato dalla struttura
del
componente.
Questo fa si che l' istruzione successiva all' evento di
interrupt sia la prima che si trova a questo indirizzo,
che è chiamato vettore di interrupt (interrupt vector).
In sostanza,
da una qualsiasi posizione
attuale nella memoria programma,
si sospende il flusso di
istruzioni e si passa
ad eseguire le istruzioni ad un indirizzo determinato,
analogamente a quello che succede per una subroutine.
Il termine dell' esecuzione di quanto contenuto
nelle istruzioni di gestione dell'interruzione viene determinato da una speciale
istruzione di ritorno-da-interrupt (RETFIE
- RETurn From IntErrupt)
ripristina il Program Counter
nella posizione da cui si era distaccato, riprendendo il flusso di
istruzioni principale, analogamente al RETURN delle subroutine.
|
Quindi, apparentemente, è una operazione del tutto analoga a quella della chiamata
di una subroutine, ma in
pratica esistono alcune fondamentali differenze. Schematicamente:
| Azione |
Subroutine |
Interrupt |
| Avvio |
a seguito dell'istruzione call |
a seguito di un evento in una periferica |
| Momento |
inserita nel flusso del programma (sincrona) |
in un qualsiasi istante del programma (asincrono) |
| Stack |
viene salvato nello stack l'indirizzo dell'istruzione
logicamente successiva a quella durante la quale è stato chiamato
l'interrupt o a subroutine |
| Destinazione |
una qualsiasi locazione della memoria programma indicata come
oggetto della istruzione call |
uno solo specifico indirizzo (vettore di interrupt) definito dalla
struttura del processore |
| Rientro |
prelevando dallo stack l'indirizzo precedentemente
salvato |
| Istruzione di rientro |
return o retlw |
retfie |
La prima differenza essenziale questa:
-
la subroutine è chiamata volontariamente durante
l' esecuzione del programma da una istruzione call
-
l' interrupt è chiamato in modo automatico da un evento hardware,
esterno al programma, e che può capitare in qualsiasi momento dell'
esecuzione del programma stesso
Se vogliamo proseguire nell' esempio iniziale, la subroutine
è analoga al fatto che sto leggendo, ma sono le cinque e a quell' ora ho l'
abitudine di bere un tè, per cui sospendo volontariamente la lettura, vado in
cucina, preparo il tè. Poi ritorno a riprendere la lettura dove l'
avevo sospesa. L' operazione di fare il tè è la stessa tutti i giorni,
per cui si tratta di una funzione ripetuta costantemente.
Nel caso dell' interrupt, invece, mentre sto leggendo, o anche facendo il tè
o qualsiasi altra cosa, ecco
che suona il telefono: devo sospendere quello che sto facendo per rispondere
ad un evento che era dato per possibile, ma non programmato
per quel determinato momento, potendo accadere in un qualsiasi istante della giornata.
Il secondo punto riguarda le routines di gestione.
-
La subroutine, richiamata dall'istruzione call,
è usata per eseguire una
certa funzione quando la logica del programma ne ha necessità. Ad esempio,
potrà trattarsi della conversione di un valore da esadecimale a BCD
oppure di un ritardo. Il programmatore, a quel punto dell' esecuzione,
richiama la funzione che gli serve, passando eventuali parametri e
raccogliendo in uscita i risultati voluti.
-
Anche la richiesta di intervento dovuta all'
interrupt va prevista e "servita" in modo adeguato, in quanto anche
all' evento che ha generato la richiesta di interrupt è indispensabile
fornire una giusta gestione. Con un esempio:
se suona l'allarme anti incendio, ma non avete previsto questa possibilità e
non sapete cosa fare, potete rimetterci la vita.
Semplicemente, questo evento, previsto e fornito dell'adeguato insieme
di istruzioni per gestirlo, accade "casualmente", in modo asincrono
rispetto al flusso principale delle istruzioni.
Dunque, sia alla call che all' interrupt devono corrispondere
delle sezioni di programma che svolgono le funzioni richieste dagli eventi.
Da questo punto di vista, chiamata di subroutine e chiamata
di interrupt non hanno alcuna differenza: nello svolgersi del programma
accade un qualche fatto e di conseguenza occorre che il programma lo
gestisca.
Anche se sia nella chiamata a subroutine che nella
chiamata a interrupt i meccansimi della CPU sostituiscono il contenuto del Program Counter con un
indirizzo preciso, lo fanno in modo sensibilmente differente:
-
la subroutine inserisce nel PC l' indirizzo che è l'oggetto del call,
indirizzo che può essere in una
qualunque posizione ammessa della memoria programma. Il compilatore
assegnerà il giusto valore.
-
l' interrupt, invece, forza nel PC un indirizzo fisso,
prestabilito dalla struttura del microcontroller, qualunque sia la causa
della chiamata. A questo indirizzo fisso si dovrà trovare la routine di
controllo dell'evento.
Una differenza sensibile:
-
si possono creare label a volontà e scrivere blocchi di codice
corrispondenti per eseguire ogni genere di funzione, disposti come meglio si
desidera nella memoria programma; al momento del call, il
PC assumerà il valore dell' indirizzo della label oggetto, quella tra le
tante che è indicata nel sorgente.
-
Per l' interrupt, invece, solitamente esiste un unico indirizzo fisso a cui il
PC è deviato a seguito dell' interrupt. Questo vuol dire che a quell'
indirizzo occorrerà scrivere un blocco logico in grado di fare fronte a tutte
le necessità richieste dall' interrupt, necessità che
diventano più complesse se si ha a che fare con sorgenti di interrupt
multiple.
Ad esempio, si deve gestire una comunicazione seriale assieme ad un display multiplexato e
una pulsantiera; le diverse periferiche
generano ognuna una richiesta di interruzione. Dato che, qualsiasi sia la
fonte, il salto con l'interrupt invia ad una sola locazione, ecco
che qui sarà necessaria non solo la gestione degli eventi, ma, prima di
questo, la discriminazione necessaria per individuare quale periferica debba
essere servita.
Dal punto di vista pratico, per i PIC Baseline e Midrange questo indirizzo
(vettore di interrupt) è posto a 004h (per i PIC18F ne esiste un secondo a
0008h; per i PIC superiori sono presenti molti vettori di interrupt).
 In pratica: scrivere una gestione dell' interrupt equivale a scrivere una
subroutine che inizia al vettore di interrupt e viene terminata con l' istruzione
retfie.
In pratica: scrivere una gestione dell' interrupt equivale a scrivere una
subroutine che inizia al vettore di interrupt e viene terminata con l' istruzione
retfie. |
Nell'istruzione di ritorno c'è, infatti, una ulteriore differenza tra subroutine e interrupt
:
Entrambe le istruzioni modificano il PC prelevando dallo stack l'
indirizzo di rientro, ma:
Questa azione di retfie
è necessaria in quanto, in
condizioni normali, una chiamata di interrupt non deve essere interrotta da
un'altra chiamata interrupt che avvenga nello stesso momento: solo quando la
prima è stata servita, se ne potrà eseguire un'altra.
Da un punto di vista
generale, quindi, le due istruzioni sarebbero analoghe per quanto riguarda il
PC, ma da un punto di vista pratico non è per niente opportuno utilizzare un
retfie a chiusura di una subroutine, dato che l' abilitazione degli interrupt
potrebbe non essere un evento previsto e quindi causa di grave blocco del
programma.
Nè è possibile utilizzare return per l' uscita dalla gestione dell'
interrupt,
dato che questa istruzione non riabilita il meccanismo di interrupt, che
resterebbe inattivo, impedendo che le successive chiamate possano essere
accolte.
Per inciso, questa è
la struttura base dei microcontroller più semplici. E' evidente che si tratta
di una gestione che può presentare limiti sensibili nel caso in cui il servire uno o
l'altro evento di interruzione non abbia la stessa priorità. Ad esempio, la
gestione di una ram dinamica ha la precedenza sulla elaborazione del
dato seriale ricevuto, in quanto, mancando il refresh con la giusta cadenza
temporale, il contenuto della memoria andrebbe perso.
Per microcontroller più complessi, esistono metodi per risolvere le varie
situazioni. Il più semplice è quello impiegato nei PIC18F, dove esistono due
livelli di priorità programmabili per ogni periferica: una interruzione a
livello basso potrà essere "interrotta" da una richiesta proveniente
da una sorgente di livello alto, ma non l'opposto.
Altri chip superiori dispongono di vettori a più livelli.
Sorgenti dell' interrupt
Ci si può chiedere: che cosa fa scattare il meccanismo
dell'interrupt?
Se la chiamata ad una subroutine è generata dall' istruzione call,
la chiamata a interrupt può essere causata da numerose fonti di evento
interne:
praticamente da tutte le periferiche integrate nel microcontroller, oltre ad
altri eventi particolari. Quindi, sono sorgenti di interrupt gli eventi
critici della periferica, come i timeout dei timers,
l' arrivo di dati in UART, MSSP o USB, la fine della conversione ADC, lo
scatto dei comparatori, il cambio di livello su particolari pin di I/O, variazioni
della tensione, scrittura della EEPROM, ecc.
Ecco, ad esempio, il diagramma logico della struttura
interrupt di un PIC18F:
Abbiamo disponibili interrupt dal modulo MSSP (SSPIF), dal
modulo ADC (ADIF), dal Timer0 (TMR0IF), dal cambio di livello sui pin (RBIF),
ecc, organizzati in due livelli di priorità programmabili.
Processori con maggiori risorse avranno strutture di interrupt più
complesse e viceversa.
Questo consente di avere in attività contemporanea numerose
funzioni a cui l'unità centrale accede a seconda delle loro necessità,
legandole in modo logico nel programma principale, nonostante la non
sincronicità degli eventi.
Vediamo più avanti maggiori dettagli sugli elementi di
questo diagramma.
Ma quale è il senso dell' interrupt e la sua necessità?
Come abbiamo visto nell' esempi della telefonata, il microcontroller esegue
un certo flusso di istruzioni e la sua attività può interessare un
elevato numero di periferiche; queste possono avere tempi di risposta propri e che possono
essere del tutto asincroni rispetto all' attività principale. Basta pensare
alla differenza tra l'overflow del Timer0, alimentato dal clock del
processore e l'evento della pressione di un pulsante: il primo è
determinabile, visto che avverrà dopo un certo numero di cicli istruzione;
il secondo è del tutto casuale.
Nell' esempio, so che il timeout avverrà ogni 100ms; ho il tempo tra un
evento e il successivo per effettuare altre operazioni, per poi andare a
verificare l'overflow con un polling. Però, non posso sapere quando
l'utente premerà un tasto e non è evidentemente possibile rimanere in
attesa dell'evento con un polling, che richiederebbe tutto il tempo
disponibile della CPU.
La chiamata
dell' interrupt interrompe ciò che il microcontroller sta facendo per
andare a rispondere alle necessità della periferica che ha inviato la
richiesta, in qualsiasi momento questo avvenga.
Quindi, posso essere in polling nell' attesa del pulsante,
ma non perderò l'overflow , perchè questo interromperà il polling; o
viceversa. Oppure anche entrambi: mandiamo il processore in sleep, a basso
consumo, e lo facciamo risvegliare a seguito dei due eventi. Abbiamo una
risposta immediata pur avendo il minimo consumo energetico.
L'interrupt garantisce diverse cose:
-
finchè le periferiche non hanno alcuna attività, il
microcontroller può svolgere altre azioni e non deve necessariamente restare bloccato in
loop di polling per verificare la situazione. Per tornare all'esempio fatto
all'inizio, non occorre stare davanti al telefono in attesa della
chiamata, ma è possibile fare altro.
-
la risposta è, comunque, rapida. Allo
scatto della chiamata di interrupt, solamente pochi cicli istruzione
sono necessari per deviare l'esecuzione alle istruzioni di gestione
dell'evento.
-
Il fatto che la richiesta di una determinata funzione sia
"automatizzato" consente al programma di effettuare in modo
altrettanto automatico ed efficiente rapide azioni di intervento a supporto
delle periferiche, dato che il programmatore
avrà predisposto quanto necessario nel software.
-
non si rischia di perdere eventi. Essi sono segnalati da
opportuni flag che, fin a quando non sono azzerati dal programma, continuano a
segnale l'evento e a richiedere un intervento in interrupt.
Queste sono le chiavi per la gestione di
diverse azioni (multi task) contemporanee ed è una funzione essenziale dei
microcontroller.
Senza interrupt, gran parte delle applicazioni con più task sarebbe
irrealizzabile. E' abbastanza raro che un sistema embedded non faccia uso di almeno un
interrupt al di fuori di applicazioni banali.
Interrupt è una delle caratteristiche più potenti e utili
disponibili nei sistemi embedded, rendendo il sistema più efficiente e più rispondente
ad eventi critici e il software più facile da scrivere e capire.
Tuttavia, dove non ne venga compresa la struttura, gli interrupt possono essere
fonte di
confusione e di errori nel programma; alcune persone li evitano per questo
motivo, anche se ogni programmatore che non sia un principiante confusionario dovrebbe essere
di casa con le interruzioni, utilizzandole come strumenti essenziali e non come
cose oscure da evitare.
Interruptfobia
Per quanto detto,
vogliamo qui fare
una digressione sul fatto che l'interrupt sia, per molti di quelli che si
avvicinano ai microprocessori, una vera bestia nera. C'è una reale
interruptfobia che finisce per condizionare la realizzazione dei programmi.
E questo è molto
riduttivo, in quanto le azioni di interrupt sono assolutamente indispensabili per
qualsiasi applicazione poco più che semplicistica; strutture di
temporizzazione, comunicazioni seriali, USB, LAN, gestione di tastiere o
encoder, ecc, ecc. non hanno alcuna possibilità di funzionare in modo anche
solo poco più che elementare senza interrupt. E la "timidezza" ad affrontare
questo argomento dipende esclusivamente dal fatto di non averne afferrato il
meccanismo.
Ma questa
posizione è facilmente superabile considerando quanto abbiamo finora detto:
semplicemente si
tratta di scrivere un tratto di programma che faccia fronte ad un evento,
fornendo l' opportuna funzione.
Se, volendo sommare due numeri, scriverò una subroutine adeguata e la
richiamerò ogni volta che ne ho la necessità, altrettanto, nel caso dovuto all'
esaurimento di un timer dovrò scrivere un tratto di programma che, ad
esempio, ricarichi il timer ed aggiorni un contatore.
Nel caso della somma dei due numeri, sarò io, nel programma, a
richiamarla e fare eseguire le istruzioni con una istruzione call quando mi servono;
per l' interrupt è la stessa identica cosa, solo che sarà l' hardware a
richiamare da se le istruzioni quando necessario. Istruzioni che, comunque,
avrò definito io, in modo tale da avere le necessarie azioni.
Comprendiamo bene che in entrambi i casi si tratta semplicemente di aver
scritto una serie di istruzioni che svolgono una data funzione e di metterle
a disposizione nel programma ogni volta che quella funzione è necessaria:
il fatto che sia l' hardware a decidere il momento in cui questo viene messo
in atto non è una complicazione, ma, anzi, è una semplificazione.
Infatti, quale è
l' alternativa ad una gestione dell' interrupt ? E' il cosiddetto polling,
ovvero mettersi in attesa dell' evento, non potendo fare altro che quello,
e, quando esso si presenta, chiamare la subroutine adeguata.
E' evidente che se il microcontroller non ha altro da
fare, attendere che un timer abbia esaurito il suo conteggio è certamente
possibile. Ma non lo è se il microcontroller deve nel contempo tenere sotto
controllo altre funzioni, anche solo una trasmissione seriale o
il controllo di un display multiplexato.
Nei casi in cui siano diverse le periferiche e le attività concorrenti
(task), ciascuna con le sue necessità di controllo e con i suoi tempi di
esecuzione, il meccanismo dell' interrupt consente al processore di seguire
una linea principale di programma e balzarne fuori per gestire un evento e
poi rientrare, anche per eventi che capitano in modo del tutto non sincrono
tra di loro. L'alternativa del polling costringe il programmatore ad un
gravoso gioco di incastro delle varie azioni, dove il multi task si
trasforma in una concatenazione critica di eventi successivi e che può
essere messo in atto solamente in un numero limitato di casi.
Cerchiamo di
chiarire ancora meglio.
Supponiamo di gestire un display multiplexato a 7 segmenti. Il multiplex
consiste nell' accendere una cifra per volta con una cadenza tale da far si
che l' occhio le percepisca senza sfarfallio.
La soluzione più semplice è quella di impostare un timer per il tempo
richiesto tra l' accensione di una cifra e l' altra.
Il timer conta e, dopo il tempo voluto, dipendente dal clock del processore
e dal valore caricato nel timer, esaurisce il conteggio e si azzera. A
questo punto è richiesta una semplice azione: ricaricare il timer con il
valore richiesto.
Dunque la funzione che corrisponde alla fine del conteggio è questa.
Posso allora procedere in due modi:
-
polling:
attendo la fine del conteggio verificando il contenuto del contatore del
timer e chiamo una subroutine che
ricarica il timer
-
interrupt:
al vettore di interrupt piazzo la routine che ricarica il timer. Alla
richiesta di interrupt, dovuta all'overflow, questa sarà eseguita automaticamente
E' evidente che
il secondo metodo è certamente il migliore. Ma supponiamo che, colpiti da
interruptfobia, vogliamo adottare il polling. Posso certamente scrivere un
programma che faccia questo: carico il timer, accendo una cifra, mi metto in
attesa della fine del timer, lo ricarico, accendo la cifra successiva, ecc.
Facile da farsi.
Però...
Se il display è fine a se stesso, non ci sono problemi: il processore deve
solo passare da una cifra alla successiva.
Ma se si tratta delle cifre di un cronometro, di un voltmetro, di terminale
? Come posso, assieme alla gestione del display multiplexato, gestire anche
l' ADC o l' RTC o l' UART? Evidentemente questo è possibile solo in minima
parte, in quanto
il processore deve seguire il polling sul timer; diventa possibile realizzando pseudo multi task che in effetti sono
una organizzazione concatenata degli eventi, lasciando momentaneamente il
polling per eseguire le altre azioni, ma dovendoci tornare prima dell'overflow.
Questo riduce il tempo disponibile per ogni azione a ben determinate
finestre temporali che, nel caso di task del tutto
asincrone, i cui eventi sono dipendenti dall' esterno del microcontroller,
possono diventare ingestibili. Si rischia di essere impegnati in
una di queste e trascurare le altre, ottenendo, ad esempio, un display
saltellante o perdendo dati sulla seriale, oppure riducendo drasticamente le
frequenze, dato che questo genere di multitask è basato essenzialmente
sulla "forza bruta" del tempo di ciclo delle istruzioni. Per poter
fare "di più" occorreranno tempi di esecuzioni minori, ovvero un
clock più elevato: potenza di calcolo utilizzata in modo poco efficace, con
un amento ingiustificato del consumo energetico.
La gestione in interrupt, invece, consiste solamente nello scrivere le
funzioni richieste da ogni evento, cosa che devo comunque fare anche per il
polling, e piazzarle in modo logico al vettore di interrupt, lasciando che
siano gli stessi eventi a chiamare le gestioni corrispondenti.
Scrivere una
gestione di un singolo evento di interrupt non è particolarmente più
complesso che gestire la stessa in polling. Occorre qualche istruzione in
più, ma queste sono banali.
Quello è differente è la logica di intervento che non è più strettamente
sequenziale; avere le idee
ben chiare su quello che si sta scrivendo richiede di ricorrere ai tanto trascurati flowchart,
che sono uno degli aiuti
più potenti nella stesura di un programma appena un poco complesso.
Dunque, non c'è
ragione alcuna per l' interruptfobia: compreso il meccanismo, si tratta solo
di aggiungere quei pochi elementi necessari. Se l' interruptfobia persiste,
si tratta di un approccio
totalmente errato alla programmazione per mancanza di una analisi minima di
quanto si vuole ottenere e delle possibilità disponibili per farlo. Questo ha come conseguenza la
perdita di una
logica di azione efficace e quindi la difficoltà a gestire le interruzioni.
Interrupt vs Polling
Interrupt o Polling? Vediamo qualcosa a questo riguardo.
In un computer, polling significa determinare lo stato di un dispositivo di I / O con azione diretta
della unità centrale che effettua una continua interrogazione del dispositivo.
Questo è possibile se le istruzioni hanno cicli molto più brevi dei tempi
di risposta della
periferica interessata, così da non perdere il momento dell'evento.
Il programma e le caratteristiche della CPU determinano la frequenza
del polling.
In apparenza, è una azione molto semplice: ad esempio, nei Baseline, privi
di interrupt, possiamo verificare l'overflow del Timer0 (solamente...)
controllando quando il contatore TMR0 va a zero. Basterà impostare un loop
in cui si verifica questa condizione.
Però, se il clock del timer è quello principale, l'azione diventa
problematica, e al limite impossibile, se non viene utilizzato un prescaler,
dato che l'avanzamento del timer è pari al ciclo di una istruzione e per il
polling più stretto ne occorrono due. E quanto è più piccolo il prescaler,
tanto più stretto dovrà essere il loop di verifica del TMR0.
Lo scotto da pagare per la "semplicità" del polling è
l'impossibilità di fare altre operazioni la cui esecuzione superi
l'intervallo tra un evento e il successivo verificati dal polling. Un multitask è
possibile solo riducendolo ad un loop concatenato di polling e di altre
operazioni.
Questo diventa impossibile dove gli eventi sono determinati da dispositivi esterni
non dipendenti dal microcontroller, ad esempio il trattamento dati su una
linea di comunicazione, la pressione di pulsanti, ecc. E quanto maggiori sono
le possibili fonti di eventi, tanto meno diventa possibile il procedere con
il polling.
Ad esempio, è possibile, senza difficoltà, impostare algoritmi che risolvano
via software trasmissioni seriali, I2C, SPI, con i cosiddetti bit-bang, ma questo consente
solamente connessioni half-duplex, impedisce al processore qualsiasi altra
attività durante la comunicazione e non consente di raggiungere le frequenze
che invece sono possibili usando le periferiche dedicate (USART, MSSP, ecc.)
in interrupt.
Interrupt è il segnale inviato all'unità centrale per avvisarla di un
evento che richiede attenzione.
Il processore deve fermare quanto ha in corso per controllare la periferica.
Solamente se si è liberi dai loop di polling si possono trattare situazioni
in cui convergano eventi non sincroni con il programma.
Con una gestione a interrupt ci sono molti vantaggi:
-
il microcontroller può servire molti dispositivi e ogni dispositivo può ottenere il servizio in base alla priorità assegnata.
In polling questo non è possibile, in quanto più task possono essere
seguite unicamente in un loop pre determinato e con temporizzazioni
inalterabili.
-
si possono escludere o includere dinamicamente da
programma le varie periferiche come sorgenti di interrupt, agendo su
specifici bit. Questo permette di gestire eventi in modo determinato da
quanto definito dal programma per ottenere le migliori prestazioni.
-
si ottiene una maggiore precisione negli eventi dipendenti
dal tempo RTC, misure di frequenza e periodo, ecc, in quanto è
determinabile con sufficiente precisione quanto tempo passa dall' evento
alla sua gestione
-
interrupt non richiede alcuna elaborazione quando non accade
nulla: diventa possibile un notevole risparmio di energia, mandando il
sistema in sleep e risvegliandolo solamente a seguito di un evento. Questa
è la soluzione ideale per dispositivi alimentati a batteria.
-
non dovendo essere impegnati in polling, la frequenza del
clock può essere ridotta, con un ulteriore riduzione del consumo.
-
il programma è meno contorto, più leggibile e facile da
gestire.
In generale, il microcontroller è più efficiente e può eseguire task
concorrenti in modo impossibile con il polling.
Usare polling o interrupt, però, dipende da ogni specifica situazione.
Un polling è facile da comprendere, scrivere e testare (lo diventa molto
meno se ci si trova a gestire sovraccarichi di dati, messaggi persi, ecc.).
Per contro, una gestione in interrupt richiede un maggior impegno nella
comprensione dei meccanismi degli eventi e della loro organizzazione nel
programma. Può essere meno semplice da scrivere e da testare, ma è assai
più efficiente ed
evita la possibilità di perdita di dati o di effettuare azioni "fuori tempo
massimo".
Inoltre, l'uso di interrupt consente di ridurre i consumi energetici, evitando di
avere un continuo frullare di istruzioni in loop di polling. Sistemi a
batteria possono avere grandi vantaggi da sleep e dall'uso di clock a
frequenze basse.
Però, nulla vieta di utilizzare in un programma solamente polling, quando la
necessità di interrupt non sia evidente e così pure l'impiegare tanto interrupt
quanto pollig nello stesso programma, a seconda delle necessità o della comodità di
programmazione. Eventi non critici sul tempo di risposta potranno sempre
essere verificati da un polling, come pure si potranno usare i flag IF con il
polling, senza attivare interrupt.
L' importante è acquisire familiarità con i vari metodi e
applicarli quando è più logico farlo.
Gestire
l' interrup
Come abbiamo visto,
possono essere disponibili numerose fonti di interrupt, derivanti da
un altrettanto elevato numero di periferiche.
Però, non è certo necessario gestire tutte le fonti di interrupt
disponibili: nella maggior parte dei casi l'applicazione utilizzerà
solamente alcune di queste periferiche, mentre le altre non verranno neppure
considerate.
Ne deriva che è necessario
almeno
un paio di bit di controllo per ogni sorgente di evento:
-
un bit per
abilitare o disabilitare la possibilità della periferica: se mi serve, abiliterò la generazione dell'interrupt; se non mi serve la
disabiliterò. Così ho la necessità di trattare solamente le periferiche
necessarie all'applicazione, mentre le altre resteranno dormienti.
-
un bit per
avvisare che la periferica ha richiesto l'interruzione. Questo è
indispensabile per identificare la sorgente che ha attivato la richiesta.
Questi due bit di
controllo sono comuni a Midrange e PIC18F (i Baseline non hanno interrupt):
| bit |
funzione |
| IE - Interrupt Enable |
bit di abilitazione, la cui sigla termina
tipicamente con IE; portando a 1 questo bit si abilita la sorgente a generare interruzioni |
| IF - Interrupt Flag |
bit di flag, la cui sigla termina con IF.
Quando questo bit va a livello 1 livello indica l' avvenuto
evento. |
Nei PIC18F la gestione dell'interruzione è più raffinata
e comprende due livelli di priorità, assegnabili praticamente a tutte le
periferiche. In questo modo si rende più efficiente l'interrupt, in quanto
ognuno dei due livelli di priorità corrisponde ad un diverso vettore di
interrupt. Sarà così possibile avere una risposta più rapida per alcuni
eventi rispetto ad altri, mentre si ridurrà la complessità delle routine di
gestione.
Ne risulta che ogni sorgente di interrupt dispone di un ulteriore bit di
controllo :
| bit |
funzione |
| IP - Interrupt Priority |
bit di priorità, la cui sigla termina con IP.
Questo bit stabilisce il livello di priorità assegnato alla sorgente ed è attivo in
dipendenza dal valore dato a IPEN <RCON:7> (questo bit 1 abilita la
priorità a due livelli). |
Questi sono i bit che occorre considerare nella chiamata ad
interrupt e che, invece, non sono esistono per le chiamate a
subroutine. Vediamoli in dettaglio.
IE
Occorre tenere presente che:
|
ogni sorgente di interrupt è una sorgente potenziale,
ovvero non chiama alcun interrupt fino a che il programmatore non
abilita la sorgente stessa |
Questo è ottenuto portando a 1 un bit IE (Interrupt
Enable) contenuto nel
registro di controllo di ogni periferica. Così il Timer0 avrà un bit TMR0IE, l' ADC avrà un
ADIE, ecc.
Cosa vuol dire questo ?
-
Se il bit IE della periferica è a 0
(valore al default dopo il reset) la periferica funziona
regolarmente, ma non produce chiamate ad interrupt.
-
La chiamata ad interrupt sarà generata dalla periferica
solo se il bit IE è stato posto a 1
|
Al POR, nessuna fonte di interrupt è attiva:
sta all' utente accendere le sorgenti volute portando a 1 il relativo bit IE. |
Ovviamente, in qualsiasi momento, riportandolo a 0, la sorgente
cesserà di generare interrupt.
IF
Quando la periferica richiede una interruzione, lo fa
attraverso un bit di flag IF (Interrupt Flag), che viene
portato a 1.
Andando a testare lo stato di questo bit si potrà
identificare la periferica che ha richiesto l' interruzione.
Ogni periferica dispone del proprio, per cui si avranno, ad esempio, TMR0IF,
ADIF, ecc.
|
E' molto importante notare che il flag IF va a livello 1 anche se l' interrupt non è abilitato, ovvero se IE di
quella periferica è a 0. |
IF è una "bandierina" (flag) sollevata per permettere il riconoscimento del
"colpevole" della chiamata.
IF è legato al funzionamento della periferica e si attiva quando si verifica
l'evento specifico; questo flag è "funzionante" in modo indipendente
dal fatto che l' interrupt sia abilitato o meno. Così, ad esempio, per
sapere quando l' ADC ha terminato la conversione, sarà sufficiente testare
lo stato di 1 del bit ADIF e per vedere se TIMER0 ha esaurito il conteggio
non occorre verificare se il registro TMR0 è andato a 0, ma basta verificare lo
stato di TMR0IF.
Occorre qui un momento di attenzione particolare:
 per consentire una gestione dell' evento, il flag IF resta a
livello 1 fino a che non viene azzerato dall'utente che ha inserito nel
programma le necessarie istruzioni.
per consentire una gestione dell' evento, il flag IF resta a
livello 1 fino a che non viene azzerato dall'utente che ha inserito nel
programma le necessarie istruzioni. |
Perchè questo? semplicemente perchè dal momento dell'
evento al momento in cui il programma inizia la relativa gestione può
trascorrere un certo tempo, ad esempio quando ci sono più chiamate di
interruzione sovrapposte. Quindi la "bandierina", una volta
alzata, resta alzata fino a che l' utente, dopo aver servito l'evento, non va ad
abbassarla (questo azzeramento si fa di solito in uscita dalla routine di gestione dell'
interrupt).
Ovvero:
la routine di gestione comporta la
necessità assoluta di resettare il flag una volta servito.
Questa azione è indispensabile per la maggior
parte delle periferiche (alcune, poche, si azzerano da sole una volta
servite in modo adeguato) in quanto il portare a 0 il flag cancella la chiamata di
interrupt e fa si che gli automatismi interni si predispongano per
accogliere un evento successivo.
Se non si portasse a 0 il flag, la
chiamata di interrupt resterebbe attiva e bloccherebbe l'esecuzione del
programma:
non appena usciti dalla routine di interrupt chiamata da quella periferica, ci si
ritornerebbe
immediatamente, dato che il flag IF non è stato "abbassato", con i risultati immaginabili.
 La gestione di un interrupt deve SEMPRE prevedere la
cancellazione del flag della periferica che ha generato la
chiamata.
La gestione di un interrupt deve SEMPRE prevedere la
cancellazione del flag della periferica che ha generato la
chiamata. |
In caso contrario non sarà possibile uscire da un loop
sul vettore dell' interrupt: se il flag non è cancellato, al retfie
si rientrerà al programma principale, ma solo per tornare immediatamente al
vettore di interrupt !
Questa gestione del flag IF è la cosa principale che occorre non trascurare nella
scrittura della gestione dell' interrupt.
|
In particolare, se usiamo in polling una periferica testando il flag
IF, senza avere
abilitato il relativo IE, dobbiamo comunque azzerare IF nella subroutine di gestione, altrimenti
lo stato della "bandierina" rimarrebbe inalterato e non
sarebbe possibile rilevare un evento successivo. |
Per riassumere in poche parole:
-
nel main, aggiungere una abilitazione dei bit IE delle
periferiche da cui vogliamo chiamate ad interrupt quando questo è
necessario. Le altre periferiche per default non saranno abilitate e quindi possono
essere non considerate.
-
si deve introdurre la routine di
gestione dell' evento, linkandola al vettore di interrupt
-
in questa routine si deve prevedere la cancellazione del flag
IF della periferica chiamante
Vedremo più avanti che l' abilitazione dei bit IE non è sufficiente ad attivare l'
interrupt: altri bit fungono da "interruttore
generale" di sicurezza e sarà necessario settare anche questi perchè l' evento di
interrupt abbia effetto.
INTERRUPT Periferici e non periferici
Una caratteristica
specifica di progetto deI PIC è quella di distinguere due categorie di sorgenti di interrupt :
La differenza
consiste in questo:
-
le sorgenti di interrupt "non periferici" sono
relative a funzioni di base presenti su tutti i chip, come Timer0, Pin Level
Change, INT. Queste hanno i bit IE e IF nei registri INTCON.
-
Le sorgenti "periferiche" sono quelle relative, appunto, alle
periferiche, come UART, MSSP, CCP , Timer2, ecc.; esse hanno i bit di controllo nei registri
PIR/PIE.
I registri di gestione.
Nei Midrange il registro INTCON ha, in generale,
questa struttura:

In pratica, contiene gli "interruttori generali" GIE
e PEIE e gli interruttori di Timer0 (T0IE), pin INT (INTE)
e Pin Level Change (RBIE o IOCIE a seconda del chip).
Inoltre contiene i flag di segnalazione degli stessi, ovvero T0IF, INTF
e RBIF (o IOCIF a seconda del chip).
Per le altre periferiche, i registri PIE contengono i bit di
abilitazione. Possono esserci più di un registro PIE (anche 5) a seconda
del numero delle periferiche installate.
Altrettanto per i registri PIF, con i flag di identificazione della
periferica chiamante.
Ecco un elenco di alcuni di questi bit, giusto per dare una
idea delle possibilità disponibili:
| Periferica |
bit IE |
bit IF |
| Timer1 overflow |
TMR1IE |
TMR1IF |
| Timer1 gate |
TMR1GIE |
TMR1GIF |
| Timer2 |
TMR2IE |
TMR2IF |
| CCP1 |
CCP1IE |
CCP1IF |
| CCP2 |
|
|
| Sychronous serial port |
SSPIE |
SSPIF |
| USART ricezione |
RCIE |
RCIF |
| USART trasmissione |
TXIE |
TXIF |
| Modulo ADC |
ADCIE |
ADCIF |
| Slope AD TMR Overflow |
OVIE |
OVIF |
| Parallel slave port |
PSPIE |
PSPIF |
| EEPROM |
EEIE |
EEIF |
| LCD drive |
LCDIE |
LCDIF |
| Comparatore |
CMIE |
CMIF |
| Oscillator failure |
OSCFIE |
OSCFIF |
| Active clock tuning |
ACTIE |
ACTIF |
| USB |
USBIE |
USBIF |
| MSSP bus collision |
BCLIE |
BCLIF |
| Low Voltage detector |
HLVDIE |
HLVDIF |
| CMTU |
CMTUIE |
CMTUIF |
Nei PIC18F, con doppio livello di interrupt, sono presenti
anche i registri IP per programmare la priorità.
La priorità
Il fatto che esista una sola locazione in cui convergono
tutte le possibili chiamate dell' interrupt è una limitazione in termini di
efficienza, in quanto il microcontroller, se sono attivate più sorgenti di
interruzione, deve per prima cosa determinare quale è quella da seguire.
Quindi, la routine di interrupt dovrà testare i bit
IF delle sorgenti attive e, per ognuna di esse, disporre della sequenza di
istruzioni appropriata.
Nelle applicazioni critiche è probabile che esistano sorgenti di interrupt
che devono essere prioritarie rispetto ad altre di importanza minore.
Disponendo di un solo vettore di interrupt e di più sorgenti, occorre che
la parte iniziale della routine di gestione contenga una qualche logica per
poter effettuare non solo la corretta gestione di tutte le sorgenti di
interrupt, ma anche di dare ad alcune una precedenza sulle altre.
Nel caso dei PIC18F, la situazione è risolta
introducendo, come abbiamo accennato sopra, due livelli di priorità programmabili con due differenti
vettori di interrupt. In sostanza, ogni livello è collegato
ad un diverso vettore, ovvero punta ad una diversa sequenza di
istruzioni.
Inoltre, particolare importanate, un evento a priorità bassa può essere interrotto da
un evento a priorità alta, ma non viceversa.
Ovviamente utilizzando due livelli si potrà avere una
risposta molto più accurata agli eventi di interrupt, assegnando alla
priorità elevata l'interrupt degli eventi più determinanti.
Da osservare che la gestione dell'interrupt con priorità è
abilitabile o meno. Per default al POR è attivato un
unico livello, per compatibilità con la struttura dei Midrange.
I microcontroller a 16 e più bit hanno strutture ancora più
complesse, ma più efficaci. Ecco una breve visione delle funzioni interrupt per i PIC a 8 e a
16bit:
| Baseline |
nessun interrupt |
| Midrange |
interrupt a 1 livello |
| PIC18F |
interrupt a due livelli |
| PIC24/dsPIC |
ogni periferica ha un proprio vettore di interrupt |
| PIC32 |
hanno un numero elevato di interrupt,
con registri di controllo per la priorità e la sub-priorità. |
Nei PIC superiori agli 8 bit ogni periferica dispone di un
proprio vettore di interrupt, rendendo così immediata la sua azione. In
pratica, aumentando le prestazioni del chip,
anche la gestione dell' interrupt utilizza meccanismi più complessi.
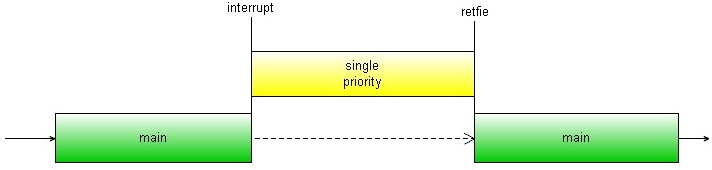
Interrompere l'interruzione.
Chiariamo ulteriormente un principio generale dell' interrupt: nella sua
versione base, una volta iniziata una routine di gestione, si fa in modo che
questa non venga interrotta da un'altra richiesta di interruzione (Midrange).
Questo è quello che si definisce interrupt con un singolo livello di
proprità.
Questo meccanismo si avvia automaticamente quando, con la chiamata
interrupt, il bit GIE, l'interruttore generale, viene spento e nessuna
altra chiamata è possibile. All'uscita dalla routine, l'istruzione retfie
riabilita l'interruttore generale e permette altre richieste successive di interrupt.
Nel tempo tra interrupt e retfie nessuna altra chiamata di interrupt è
possibile: vengono settati i flag IF delle periferiche in cui è avvenuto
l'evento specifico, ma questo non interrompe l'esecuzione della gestione
iniziata. Solamente dopo l'istruzione retfie, se sono presenti flag IF
attivati, si avierà una nuova chiamata di interruzione.
Questo consente di avere gestioni di interrupt logicamente più semplici ed è relativo
alla semplicità del chip che non è previsto per applicazioni molto
complesse.
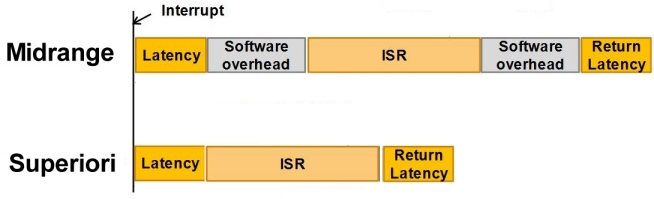
Se è necessaria una maggiore efficienza nella gestione degli eventi, i dispositivi dotati di due livelli di
priorità funzionano in modo differente: se un dispositivo a
cui è assegnato il livello inferiore richiede un interrupt, durante la sua
gestione una richiesta a livello superiore potrà interrompere quella
corrente.
L'interrupt1 è a basso livello; durante la sua esecuzione avviene un
evento collegato ad una priorità di livello superiore e questo
"interrompe l'interruzione" in corso.
Così, dove siano concorrenti diverse sorgenti di
interruzione, di cui una richiede una gestione prioritaria rispetto a
qualsiasi altra, non ci saranno liste di attesa sull'unico vettore di
interrupt.
Ovviamente, la gestione di interruzioni annidate richiede una particolare
cura nel salvataggio dei registri sensibili e nella sua struttura
organizzativa, in modo da non
ritrovarsi con dati alterati o crash della logica.
PIC superiori (PIC24, PIC32) dispongono di meccanismi di interrupt più
complessi.
Priorità "software".
In un sistema con priorità singola, se abbiamo una sola sorgente di
interrupt, non ci sono problemi: la routine di gestione sarà specifica per questa periferica.
Se, però, abbiamo più di una sorgente, qualunque di esse richieda una
interruzione, devierà il PC all'unico vettore di interrupt.
Tipicamente, la gestione avrà questa struttura:
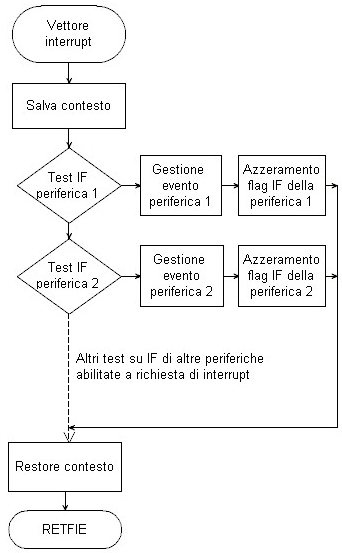 |
Il Program Counter viene deviato al vettore di interrupt ed inizia la
routine di gestione. Questa determina quale periferica sia la
"colpevole" della chiamata, verificando quale bit IF è
andato a 1, in modo da eseguire la relativa gestione.
Consideriamo che siano attive diverse sorgenti
di interrupt e il vettore sia unico, come capita nei Midrange. Tra la
richiesta di interruzione e la deviazione del program counter è necessario un certo
numero di cicli istruzione; può capitare che, durante questo
tempo, anche le altre periferiche richiedano una interruzione, portando a
1 i relativi flag.
Il flow chart descrive l' azione dell' algoritmo: viene verificata la
periferica Uno, poi la Due, poi la Tre e così via.
Se la è stata la Due a effettuare la chiamata e solo poco dopo anche la Uno
lo ha fatto, sarà eseguita, in ogni caso, per prima la gestione della periferica
Uno. All'uscita della routine sarà cancellato il flag IF di questa
periferica.
Al ritorno al main, ci sarà immediatamente un rientro al vettore di
interrupt, in quanto i flag IF della Due è ancora acceso. Ora la
routine troverà azzerato il flag della periferica Uno e servirà quello
della Due e così via.
Se fosse stata la Tre ad avere, per pochi microsecondi, richiesto per
prima l'interrupt, si troverebbe comunque ad essere l'ultima servita. |
Se osserviamo bene, vediamo che, in presenza di un solo vettore, si determina
comunque una priorità
"software" agli interrupt. Quindi
dove è richiesto, si potrà attribuire una priorità alle varie sorgenti
analizzandole in ordine di importanza, partendo da quella più
determinante e le altre in successione.
Questo accade anche se si hanno due livelli di priorità con
più di due sorgenti di interruzione. La priorità più elevata sarà
attribuita all'evento più significativo per l'esecuzione del programma, ma
le altre sorgenti dovranno essere gestite come visto ora.
Da queste considerazioni si può apprezzare la funzionalità
presente nei PIC superiori di una presenza di vettori distinti per ogni
periferica e di una gestione dei livelli più articolata, che permette di
intervenire con tempi di esecuzione quanto mai abbreviati.
L'interruttore generale.
Occorre ancora focalizzare un elemento: se disabilitiamo il bit
IE di una sorgente di interrupt,
questa azione NON attiverà l'interrupt. Però le sorgenti possono essere
varie e, nella necessità di bloccare tutti gli interrupt, si dovrebbe
ricorre ad una serie di disabilitazioni singole.
In effetti, esiste un "interruttore generale" : si tratta del bit GIE (Global Interrupt Enable) del registro
INTCON.
Questo bit, è, per default al POR, a livello 0, impedendo qualsiasi
interrupt, a prescindere dal valore dei bit IE.
Per disporre della funzione, occorre portare da programma questo bit a 1.
Quindi, volendo attivare l'interrupt di una sorgente, la sequenza sarà:
-
abilitare il bit IE della sorgente voluta
-
abilitare il bit GIE per attivare la funzione
di interrupt
Va ancora aggiunto un elemento: a seguito della
divisione vista sopra tra sorgenti periferiche e non periferiche, i bit di abilitazione globale,
in realtà, sono due:
il già citato GIE e un PEIE (PEripheral Interrupt Enable) .
Questo bit abilita o disabilita solamente gli interrupt periferici.
In pratica,
volendo abilitare l'interrupt di una sorgente periferica occorrerà:
-
abilitare il bit IE della periferica voluta
-
abilitare il bit PEIE se si tratta di un
interrupt periferico
-
abilitare il bit GIE per attivare la funzione
di interrupt generale
| |
sorgente non periferica |
sorgente periferica |
| abilitazione generale |
GIE |
GIE + PEIE |
| abilitazione specifica |
IE |
IE |
Volendo
disabilitare momentaneamente gli interrupt periferici, basterà agire su PEIE.
Volendo disabilitare momentaneamente
tutti gli interrupt, si agirà su GIE.
Vediamo
di chiarire
con qualche diagramma.
Lo schema seguente utilizza delle funzioni
logiche AND e OR per spiegare il funzionamento della catena di bit preposti
al controllo di un interrupt.
Abbiamo due livelli di interrupt e quindi una duplicazione
degli elementi della logica; così, il bit GIE si sdoppierà in un GIEH e in
un GIEL relativi ai due livelli.
Inoltre, sono presenti dei bit IP che programmano la priorità della
periferica.
Per i Midrange vale la stessa cosa, ma limitando ad un solo livello. Per i
PIC superiori la struttura è ancor più complessa.
Una breve nota: l'apparente complicazione data dalle
numerose possibilità che offrono i chip che integrano varie periferiche è
troppo spesso un ostacolo che l'utente pensa di non riuscire a superare.
Però, come per la gran parte degli elementi periferici del microcontroller va
ricordato che, in generale, la filosofia di progetto dei chip embedded è
tale per cui la presenza di una molteplicità di periferiche, funzioni,
istruzioni, non deve essere vista come un aggaravio della gestione rispetto
ad un chip meno ricco.
Per default, le funzioni al di là di quelle basilari sono
normalmente disabilitate.
Entrano in gioco solamente quando l'utente
le attiva settando gli opportuni bit da programma.
In caso contrario è come se non ci fossero ! |
Nel diagramma precedente sono visibili numerose fonti di
interrupt, oltre al gioco della doppia priorità.
Però, per default all' avviamento, nessuna di queste fonti è attivata e
non è neppure attivata la doppia priorità.
Ne deriva che questa apparente complicazione esiste solamente nel caso in
cui, volontariamente, attraverso le istruzioni, si vada ad abilitare queste
funzioni. In caso contrario, nessun interrupt è attivo e ne posso abilitare
anche uno solo, quello che mi interessa, lasciando "dormienti"
tutti gli altri: come se non ci fossero.
Quindi, non esiste alcuna difficoltà nello scrivere un programma per un
vecchio 16F84 o per un recente 18F14k22.
In entrambi, se intendo usare solamente il Timer0, abiliterò l'interrupt
solo di questo, mentre per tutte le altre periferiche che non uso, non mi
interesserà neppure leggere (per il momento...) i relativi capitoli del
foglio dati, venendo così a mancare anche il motivo di panico che coglie
molti davanti a data sheets da 600 e passa pagine.
Ma torniamo alla nostra descrizione.
Prendiamo ad esempio l'interrupt generato dall'overflow di TIMER0.
Se il timer termina il conteggio, passando da FFh a 00h, il
bit TMR0IF va a livello 1. Questo bit è in AND con i bit di abilitazione
TMR0IE e il bit di priorità TMR0IP: se entrambi sono a livello 1, anche l'
uscita dell' AND va a livello 1.
Questa uscita è in OR con altre catene similari: dunque
basta che uno solo degli ingressi dell' OR vada a livello 1 perchè l'
uscita del gate sia pure a livello 1.
Questa uscita viene riportata ad un ulteriore AND che la
somma al bit di abilitazione GIE/GIEH: se questo è a livello 1, l' uscita
dell' AND, a livello 1, attiva la chiamata di interrupt.
Nello stesso tempo, se la funzione è abilitata a questo, un gate OR comanda
il wake up dalla condizione di sleep.
Il vettore che viene sostituito al Program Counter, a
seguito della richiesta di interrupt, è posto a 0008h.
Nella modalità ad un solo livello di priorità, il bit
TMR0IP non ha effetto. Quindi, se esemplifichiamo quanto detto con una
catena di interruttori, otteniamo:
Se è selezionata la modalità con due livelli di priorità,
in serie alla catena si inserisce anche il bit TMR0IP.
Un caso particolare è costituito dall' INT0, che non ha bit
di selezione del livello di priorità e quindi è attivo sempre alla
priorità più alta.
Così dovrebbe essere facile seguire le altre fonti di
interrupt attraverso la catena degli "interruttori" logici che le
abilitano, osservando che lo switch di priorità IP (quando abilitato),
invia la chiamata di interrupt ad un vettore diverso, posto a 0018h.
 |
Da notare che questo vettore è abiltato dal bit GIEH(GIE), ma
anche dal bit GIEL(PEIE).
GIE abilta il complesso degli interrupt e PEIE solo quelli
periferici, in modalità senza priorità.
Nel modo con priorità GIE, che viene chiamato GIEH, di nuovo
abilita in generale gli interrupt, mentre PEIE, che viene chiamato
GIEL, abilita solo quelli a priorità bassa |
Schematizzato come interruttori:
Ci si può chiedere a cosa possano servire gli "interruttori
generali" che sono azionabili durante il programma.
In generale, la loro funzione è quella di disabilitare momentaneamente le
sorgenti di interrupt perchè viene eseguita una operazione che non deve
essere interrotta; un esempio di queste operazioni che non vanno interrotte,
pena il loro fallimento, è costituito dalla scrittura della EEPROM. Siccome
potrebbero essere attive varie sorgenti di interrupt, un "interruttore
generale" è molto più efficace e semplice da azionare che non la
modifica dei singoli bit IE .
Interrupt Latency.
Da quanto detto, deriva che, al momento di uno specifico
evento, la periferica interessata attiva la chiamata interrupt e il
programma viene deviato immediatamente verso la sua gestione.
Ma quanto "immediatamente", dato che tutte le azioni del
processore sono determinate dal clock del sistema?
In effetti va considerato che esiste una interrupt latency, ovvero un
tempo necessario alla logica interna per individuare la richiesta di
interrupt e modificare il PC.
Questo tempo può rivestire importanza in applicazioni particolari, dove il
progettista ha necessità di controllare che l'interrupt risponde abbastanza velocemente per l'applicazione
e che il carico di interrupt non pregiudichi l'esecuzione dell'applicazione
oppure si debba tenere conto di questo tempo in applicazioni di precisione,
come RTC o misura di frequenze.
Si può essere, quindi, nella necessità di chiedersi: quanto tempo impiega l'
esecuzione dell'interrupt?
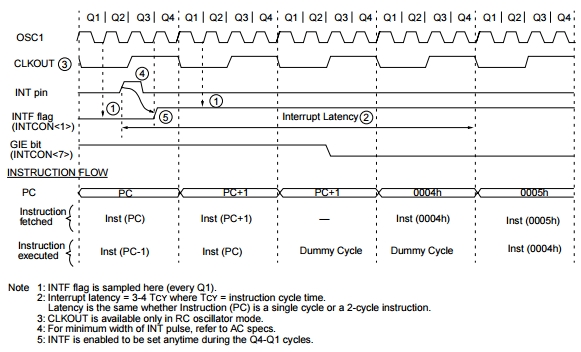
Va fatta una prima considerazione: il segnale di richiesta di interruzione deve essere sincronizzato con il clock
della unità centrale e deve essere completata l'istruzione in corso.
Per i Midrange, questo comporta un tempo di latenza è di 3 cicli
istruzione (tcyc) nel caso in cui la periferica chiamante è sincrona con il
clock. Nel caso di periferiche "asincrone", come UART o INT, il tempo di
latenza può aumentare ad un massimo di 3.75 e dipende dal momento in cui l'
evento avviene rispetto all'andamento del clock.
Ad esempio, per il pin INT:
3.75 potrebbe risultare un numero strano, ma ricordiamo che nei PIC il clock principale è 4 volte il tcyc e le quattro fasi Q1/2/3/4 sono utilizzate dalla logica interna
per sincronizzare varie azioni.
Per gli Enhanced Midrange, i tempi sono 3 o 4 tcyc per
ingressi sincroni e da 3 a 5 nel caso di ingressi non sincroni.
Analogamente per i PIC18F.
Anche l'esecuzione dell'istruzione retfie
impegnerà 2 cicli.
Salviamo il contesto.
Abbiamo notato nel flow chart precedente la presenza di due
blocchi: uno, iniziale, di "salvataggio del contesto" e uno finale
di "restore del contesto". Vediamo cosa significano.
Il salto ad una subroutine non è, in realtà, una sospensione del flusso
logico principale, ma l'inserimento in questo di un blocco di istruzioni che
è richiesto per completare una azione. Ad esempio, è stato elaborato un
dato ed ora è richiesta la sua trasmissione su una uscita seriale; si
richiamerà la subroutine opportuna. Al rientro, il programma procederà
all' elaborazione successiva.
E' ovvio che, nel passare ad una subroutine, il programmatore ha ben chiaro il contesto in
cui questo accade, ovvero della situazione dei registri prima e dopo la
chiamata. Ad esempio, la routine di trasmissione riceve attraverso WREG il
dato da trasmettere e ritorna con un flag indicatore dell'esecuzione.
Un interrupt, invece, "interrompe" in un momento del tutto
casuale una qualsiasi attività dell'unità centrale per eseguire le
istruzioni di gestione di un evento. Questo non vuol dire che sia
"inaspettato": infatti lo abbiamo abiltato noi da programma,
scrivendo al vettore di interrupt una opportuna routine di gestione
dell'evento.
Ma questo vuol dire che la situazione dei
registri principali del sistema (WREG, STATUS, PCL, PCLATH, FSR) può venire
cambiata in modo determinante durante l'esecuzione delle istruzioni relative
al vettore di interrupt.
Facciamo un esempio: il programma sta eseguendo un algoritmo matematico in
cui sono coinvolti WREG e STATUS. Questo processo viene interrutto in un
istante qualsiasi dalla richiesta dell'UART che ha
ricevuto un carattere. L'algoritmo matematico è sospeso e si passa alla
gestione del carattere arrivato; la routine lo piazza in un buffer, ma
durante la sua esecuzione ha modificato WREG, STATUS, FSR.
Al termine della gestione dell' evento, il retfie
riporta il PC all' istruzione
successiva a quella in cui è avvenuta la chiamata, ovvero il programma
riprende ad eseguire l'algoritmo matematico al punto in cui era stato
interrotto. Però lo fa con valori nei registri WREG e STATUS diversi da quelli precedenti:
il risultato dell'operazione matematica sarà alterato !
Dunque:
|
Prima di entrare nella routine di gestione dell’interrupt è
necessario
salvare il contesto, ovvero i registri principali, come STATUS e WREG. |
All'uscita della routine, i parametri salvati saranno
riscritti nei registri (restore), in modo tale da ripristinare la continuità
dell'esecuzione in modo corretto.
Nei Midrange questa operazione va fatta a cura del
programmatore e richiede un certo numero di istruzioni ed occupa locazioni di
RAM pari al numero dei registri interessati. Parliamo di WREG e STATUS, come
registri principali. Però, dove sono usati, occorrerà salvare anche il PCL/PCLATH,
l'indice indiretto FSR e così via.
Tipicamente, dove il salvataggio del contesto non è
automatico (ovvero nei Midrange), occorrerà provvedere, in Assembly, scrivendo un paio di
macro.
Savereg MACRO
movwf
w_temp ; salvare
W
movf
STATUS,w ; copia
STATUS in W
banksel status_temp ; modifica
banco RAM
movwf
status_temp ; salva STATUS
movf
PCLATH,w ; copia
PCLATH nel registro W
movwf
pclath_temp ; salva
movf
FSR, w
; copia FSR in W
movwf
fsr_temp ;
salva
ENDM
Restoreg MACRO
movf
fsr_temp,w ; recupera copia
di FSR
movwf
FSR ;
ripristina
movf
pclath_temp,w ; recupera copia del PCLATH
movwf
PCLATH ;
ripristina
movf
status_temp,w ; recupera copia del registro di stato
movwf
STATUS ; ripristinare
senza modificarlo
swapf
w_temp,f
swapf
w_temp,w ;
retfie
; ritorno da interrupt
ENDM |
La famiglia PIC16F ha un certo numero di limitazioni e quando si tratta di salvare e ripristinare il
contesto occorre tenerne conto:
-
Lo stack non è accessibile come dato (non ci sono
istruzioni genere
pop e push)
-
L'istruzione MOVF modifica il flag Z dello STATUS
-
La RAM dati si trova suddivisa nei banchi, per la maggior parte
assieme a registri funzioni speciali
-
Non tutti i chip hanno un'area RAM comune ai banchi (shared
RAM) di ampiezza sufficiente a tutte le necessità di una applicazione
complessa
-
La memoria programma è suddivisa in pagine da 2K (core 14-bit)
Tutte queste peculiarità devono essere gestite dall'utente durante la creazione della routine di
interrupt.
In particolare:
-
nel processo di restore del contesto, si dovrà usare l'istruzione SWAPF
per ripristinare il valore dello STATUS, in modo da non modificarlo con
un MOVF.
-
Se si sta lavorando su più pagine o con tabelle, il registro PCLATH
deve essere salvato e ripristinato
-
usando nel programma principale FSR, occorre che questo
sia salvato e ripristinato
-
occorrerà prestare attenzione alla posizione della RAM
dati utilizzata, commutando il giusto banco
-
durante la gestione di un interrupt, lo stato del bit
GIE non deve essere modificato, a meno che sia ben chiaro cosa si sta
facendo.
E' evidente che queste operazioni, che non hanno
direttamente a che fare con la gestione vera e propria dell' evento di
interrupt aggiungono tempi di esecuzione che può essere necessario
conteggiare.
Nei PIC delle famiglie superiori ai Midrange, il
salvataggio e il restore del contesto sono effettuati automaticamente,
operazione che non richiede tempo addizionale, nè locazioni della RAMi
corrente, dato che utilizzano aree di memoria dedicate. Questo è un notevole
sollievo per il programmatore, che non deve aggiungere istruzioni e che non
deve tenere conto di tempi addizionali nell'esecuzione, banchi, ecc.
Per quanto riguarda i linguaggi come il C, in generale le
operazioni di salvataggio del contesto sono automatizza ed adeguate alle
caratteristiche di ogni chip.
In tutti i casi, se occorre salvare altre variabili oltre
quelle previste dagli automatismi, occorre procedere aggiungendo opportune
istruzioni.
FAQs
-
Si dice correntemente che la routine di interrupt
deve essere la più breve possibile. E' corretto?
Questo non del tutto esatto.
In realtà, la permanenza nella routine deve impegnare un tempo tale da
permettere al resto del programma di operare correttamente.
In generale, un programma è costituito da un loop primario, la cui
esecuzione richiede un certo tempo. In generale, quando non si ha modo
di valutare i tempi nei dettagli, certamente la routine di interrupt è
opportuno sia la più breve possibile. Per certo, deve essere più breve del loop principale,
limitandosi alla gestione dell' evento e rimandando con flag e buffer
l'elaborazione dei dati al processo principale
Però, va anche tenuto conto che l'interruzione deve capitare con
una frequenza tale da permettere il completamento delle altre operazioni.
Ad esempio, se dobbiamo effettuare il refresh di un display ogni 10ms,
possiamo usare un timer per ottenere questa cadenza di tempo per le
chiamate interrupt, ma l'operazione di refresh deve ovviamente durare
meno di 10ms. Se abbiamo ridotto la durata di esecuzione della routine di interrupt ad
un minimo di 2ms, ma abbiamo altre sorgenti di interruzione che, per
numero o per frequenza di intervento, sono tali da richiamare
l'interruzione ogni ms, il programma sarà bloccato in queste gestioni
senza poter fare altro.
-
Si sostiene che interrupt va utilizzato con eventi
"non frequenti" o casuali. E' esatto?
No, per nulla. L' affermazione non ha senso.
Cosa vuol dire "non
frequenti"? Che capitano una volta al giorno? o una volta al mese?
o una volta al minuto?
L'arrivo di un carattere da una linea seriale può essere
"poco frequente" nel complesso del tempo di funzionamento del
processore, ma quando arriva una stringa composta da decine di caratteri,
questi si susseguono alla cadenza del baud rate per un certo tempo. E in
questo tempo non sono affatto "non frequenti". E in un RTC la cadenza di interrupt del timer preposto sarà per nulla casuale.
La "frequenza" dell' evento interrupt può essere
qualsiasi.
Il suo solo limite è quello di non poter capitare con una
cadenza tale da impedire l'esecuzione della sua gestione. Come nella
questione precedente, se il ciclo di istruzioni è 1us, non sarà
possibile seguire eventi che capitano ogni 100us, assieme ad altre
operazioni che richiedono 150 istruzioni; non ce ne sarebbe il tempo.
Se, però, il ciclo di istruzione diventa 50ns, questo può diventare
possibile. Non sono questioni di "assoluti", ma sono
valutazioni da fare relativamente ad ogni situazione specifica.
-
Si legge che interrupt è meglio in quanto evita di sprecare
i cicli di CPU del polling...
Dipende da come si intende la frase.
Se sto facendo un polling, un
loop di istruzioni è certamente sempre in esecuzione.
Se utilizzo un interrupt, posso mettere il processore in sleep ed
attendere a consumo minimo l'evento programmato. In questo senso
l'azione dell' interrupt è vantaggiosa.
Se, però, siamo in situazioni diverse, non esiste mai "uno spreco
di istruzioni" (se chi scrive il sorgente ha una minimo buon senso
e competenza...).
Le istruzioni del loop di un polling servono a verificare il bit voluto;
non ne posso mettere di meno. Così come un ciclo di delay basato
sull'esecuzione di istruzioni (waste
time) non spreca nulla: le istruzioni eseguono il tempo di attesa
richiesto; non ne posso mettere nè di meno, nè di più. E un ritardo
non è uno spreco di istruzioni, ma una necessità del programma che
gestisce una determinata azione.
Certamente, usando interrupt, potrò realizzare attese con i timer,
lasciando libera l'unità centrale di svolge altre attività in attesa
dell'overflow. Ma dove questo non serve, polling e waste time sono
perfettamente adeguati.
Diverso sarà il caso in cui occorra una minimizzazione della corrente
assorbita dall' applicazione.
La scrittura di un programma efficiente molto probabilmente comprenderà
meno istruzioni di uno inefficiente; sta al programmatore stendere
sorgenti adeguati all' applicazione, ma che non diventino contorti e
criptici nel tentativo di impiegare il minor numero di istruzioni.
Il sorgente deve essere anche sufficientemente elegante e leggibile da
poter essere compreso, modificato e aggiornato con facilità.
-
L'interrupt è critico e complicato da gestire...
In primo luogo, se si ricorresse con maggiore assiduità alla stesura di
diagramma di flusso prima di iniziare a scrivere istruzioni, si
risolverebbero molti dubbi.
La "complicazione" nella gestione di eventi in interrupt
piuttosto che in polling consiste solamente nella necessità di un
approccio logico un poco diverso. Superato questo, non esiste alcuna
reale difficoltà.
Il concetto guida è quello di far eseguire nella routine interrupt
esclusivamente la gestione della periferica interessata, lasciando al
main le operazioni logiche conseguenti. Ad esempio, la gestione di un
UART in ricezione consisterà nello spostare il carattere ricevuto in un
buffer e segnalare l'evento con un flag. Sarà poi compito della logica
del main il trattare opportunamente il carattere.
Quanto alla criticità, con questo solitamente si riduce al fatto di
non aver ben chiaro il problema del flag IF; tipicamente, lo scordarsi
di cancellarlo crea situazioni di mancato funzionamento del software,
apparentemente difficili da diagnosticare. Basta solo comprendere che i
flag sono bandierine "alzate" per dire alla logica del
programma che è accaduto un evento e che sta a noi
"abbassare" una volta identificate.
Certamente potranno esserci casi in cui siano convergenti numerose
sorgenti di interrupt, il che richiede un certo impegno nello studio
della migliore struttura logica per far convivere correttamente le varie
azione.
Oppure si ha a che fare con tempi di intervento critici, in quanto di
ordine vicino a quello del ciclo di istruzione; in queste condizioni, se
non è possibile un aumento della frequenza del clock, occorre una certa
cura nella costruzione dei vari algoritmi e loop. Ma questi casi non
hanno direttamente a che fare con la struttura dell'interrupt;
piuttosto, con la necessità di seguire hardware complessi o veloci. E,
per altro, si tratta di condizioni che non sarebbe possibile in alcun
caso affrontare in polling...
|