PSP - Parallel Slave Port
Questa funzione, per molti, risulta enigmatica e, in effetti, non è molto
conosciuta, nè comune.
In pratica, la Parallel Slave Port è un mezzo di comunicazione
tra un
microprocessore
e il PIC, che opera come slave.
Ed in effetti va
ricordato che il progenitore dei PIC attuali (il PIC1640 di General Instruments) era proprio
previsto per essere utilizzato come una periferica intelligente sul bus di
altri microprocessori.
Possiamo
caratterizzare i due ambienti così:
| microprocessore - uP |
i componenti del sistema (memoria
e periferiche) sono esterni alla CPU, a cui sono collegati
con i bus |
| microcontroller - uC |
i
componenti del sistema (memoria, periferiche, bus) sono tutti
contenuti all' interno di un singolo chip (embedded) |
Trovate qui
una trattazione più dettagliata dell' argomento.
I due sistemi sono dedicati ad applicazioni
di complessità differente:
-
un sistema a microcontroller è
essenzialmente preposto all' automatizzazione/automazione di un qualche dispositivo o
processo limitato (regolatori di velocità, orologi, temporizzatori,
controller di periferiche, rilevamento di segnali, elettrodomestici, auto, ecc.). Si tratta di
applicazioni dedicate, cost sensitive, non espandibili.
-
un sistema a microprocessore prevede una possibilità di espansione, una
disponibilità ampia di periferiche e memoria, una capacità di elaborazione
elevata e si presta per ambiti di controllo e automazione più complessi
(personal computer, PLC, controlli di processo, telcomunicazioni, ecc.)
Nella gamma delle periferiche associabili ad un sistema a
microprocessore trovano posto periferiche "intelligenti",
ovvero in grado di svolgere funzioni complesse sotto il controllo del
microprocessore, ma in modo autonomo rispetto alle sue risorse.
Questo è, appunto, la collocazione del modulo PSP, ovvero
quella di permettere la comunicazione tra microcontroller (periferica
intelligente) e microprocessore, attraverso il bus dati di quest' ultimo.
 |
Schematizzando la struttura del sistema a microprocessore,
troviamo:
- un bus DATI
- un bus INDIRIZZI
- e un bus di CONTROLLO
Ogni periferica esterna alla CPU è indirizzata dal bus
INDIRIZZI, attraverso delle logiche di CS (chip select) e scambia i
dati sul bus DATI, sotto il controllo dei segnali RD (Read) e WR (Write)
generati dal microprocessore e inviati sul bus di CONTROLLO. |
Il PIC che dispone
del modulo PSP utilizza il suo PORTD per connettersi in modo
parallelo al bus dati, dove le
informazioni sono scambiate in parallelo, sotto il controllo dei segnali
!RD, !WR e !CS, che sono
forniti dal master:
Va compreso che
questa funzione di slave riguarda la comunicazione dei dati dal PIC verso il
microprocessore e viceversa, comunicazione che avviene su richiesta del
microprocessore e con le temporizzazioni date dai segnali del bus. Per il
resto il PIC lavora nel suo solito modo, collezionando i dati da inviare al
bus o eseguendo i comandi ricevuti attraverso il bus.
Dunque, dovrebbe
essere ora chiaro cosa sia PSP: è una porta parallela a 8 bit per
scambiare dati con un ambiente "master" esterno.
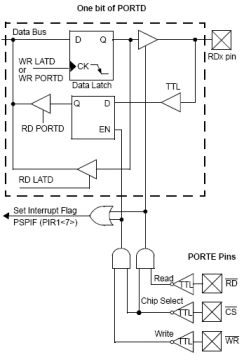 |
La struttura hardware del
PORTD è leggermente diversa dalle altre in quanto, nel momento in cui
è abilitata la funzione PSP, sono dei segnali esterni WR, RD e CS
quelli che vanno a gestire lo scambio dei dati:
- WR: a livello 0
abilta il data latch in ingresso del microcontroller e carica il
dato fornito sul bus del microprocessore
- RD: a livello 0 abilita il
gate tree state di uscita dei dati dal latch dati verso il bus
esterno del microprocessore
- CS: a livello 0
abilita le funzione RD o WR
Contemporaneamente, i
segnali RD o WR generano una richiesta di interrupt settando il flag
PSPIF.
La logica di ingresso dei
segnali WR,RD e CS sono inverter a livello TTL.
Da ricordare che, data la necessità di un PORTD
a 8 bit completi,
la funzione PSP non è disponibile per PIC in packages minori di 40 pin.
|
Il latch dei dati di lettura e quello di scrittura del PSP si
trovano allo stesso indirizzo, come registro PORTD.
Però, in pratica, si
tratta di due diversi buffer, per cui:
-
scrivendo PORTD non si sovra scrive un
eventuale dato inviato dal master e
-
leggendo PORTD non si legge il dato in uscita, ma l' ultimo inviato dal master.
La scrittura di PORTD non si traduce nell' apparire dei corrispondenti
livelli di tensione sui pin se non nel momento in cui il master richiederà
la lettura.
Questo vale solamente quando PORTD funziona come PSP,
mentre in GPIO si tratta di una struttura uguale a quella degli altri port.
Le
temporizzazioni tra i segnali sono tali da potersi adattare con poca
circuiteria esterna ai bus dei principali microprocessori.
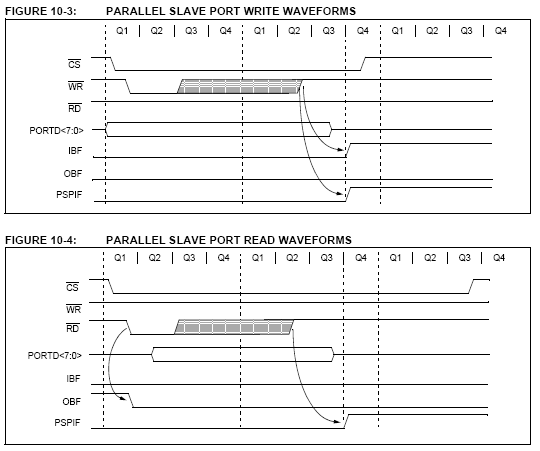
In
scrittura, il microprocessore seleziona la periferica mandando bassa la
linea CS relativa e quindi invia i dati sul bus dati, sincronizzato dal
segnale WR. Il PIC riceve l' informazione dell' arrivo dei dati, che sono
conservati nel latch dati fino alla prossima scrittura, attraverso il flag
PSPIF e IBF
, che
vanno a 1 al termine della fase Q3 successiva alla chiusura del segnale WR
(figura 10.3).
In pratica, i dati forniti dal master sono scritti sul PORTD quando
sia
!CS che !WR sono a livello basso; i bit PSPIF di interrupt e il flag IBF
(TRISE7) sono settati al termine della scrittura, permettendo al programma
la cattura dei dati. IBF a livello 1 indica che un dato è stato scritto dal
master sul PSP ed attende di essere letto
ed
è azzerato dalla lettura del
dato presente sul PSP da
parte del PIC.
Il lettura,
analogamente, il microprocessore seleziona la periferica con CS e richiede
l' emissione dei dati con il segnale RD. Il PIC
ha preparato il dato
nel buffer e all' arrivo di
RD i dati sono passati al bus esterno;
la conclusione dell' operazione è segnalata dal
flag PSPIF.
I dati diretti al
master sono letti con !RD e !CS a livello basso; in tal caso oltre a
PSPIF, il flag relativo è OBF (TRISE6)
che va a 0 non appena è
ricevuto il segnale RD dal
master (figura 10-4).
Al termine della fase Q3
successiva alla chiusura del segnale RD, il flag PSPIF sarà settato.
In pratica, prima di scrivere un nuovo dato
nel latch del PSP,
il programma deve verificare che il precedente
sia stato letto, onde evitare un overflow;
nel caso in cui sia stato ri scritto PORTD mentre il
dato precedentemente non era ancora stato letto
(il dato
precedente viene sovra
scritto e va perduto) è
segnalato dal flag IBOV
(TRISE5) che va a 1.
IBOV deve essere azzerato da software prima della prima scrittura,
caso mai si
trovasse a 1. Prima di una successiva scrittura, va letto per assicurarsi
che sia a zero, ovvero che il dato precedente è stato trasmesso
regolarmente. Viene rimesso a zero solo via software.
I valori dei tempi sono riportati nella Table 26-13 delle
caratteristiche AC (pag.353).
Per utilizzare questa modalità occorre :
come GPIO e non come ingressi
analogici :
movlw b'11111111'
; port A & E come digitali
xorwf ADCON1 |
programmare PORTE2:0 come ingressi
(WR, RD e CS sono generati dal master) attraverso i bit 2:0
di TRISE:
movlw b'00000111'
; port E come input
xorwf TRISE |
abilitare il bit PSPMODE (TRISE<4>)
:
Utilizzando la funzione PSP, il registro TRISD non ha
nessuna funzione, in quanto la direzione del PORTD viene stabilita dai
segnali di controllo che arrivano dal master.
Riassumendo:
movlw
b'00000111'
; port E come digitali
xorwf ADCON1
movlw b'00000111'
; port E come
input
xorwf TRISE
bsf PSPCON, PSPMODE ; abilita PSP
bsf TRISE, PSPMODE |
Le operazioni di PSP sono gestite in interrupt
in quanto si suppone di avere a che fare con una comunicazione molto rapida;
inoltre si tratta di un sistema di scambio dati asincrono gestito dal master
esterno
a cui
il PIC si deve
sincronizzare. Quindi
questa
la via più adeguata, anche se teoricamente è possibile un polling
dei flag..
L' interrupt è chiamato quando la scrittura o la lettura da parte del
master sono completate.
-
Il bit di abilitazione dell' interrupt è PSPIE
(PIE1<7>) che va posto a 1 se si desidera attivare l' interrupt
della porta PSP.
-
Il bit di selezione della priorità dell' interrupt è
PSPIP (IPR1<7>).IPIR1 è a 1 se si desidera l' alta priorità,
altrimenti va a posto a 0. L' abilitazione del modo interrupt con
priorità richiede di aver settato il bit IPEN (RCON<7>) ;
altrimenti viene impiegato un sistema di interrupt senza livelli di
priorità e l' impostazione di PSPIP è indifferente.
-
Il flag di identificazione è PSPIF (PIR1<7>) che
va a 1 a seguito delle operazioni di scrittura o lettura del master.
PSPIP va cancellato da software.
Il programma di gestione della PSP deve, una volta settato
abilitato relativo, attende la richiesta e distingue le operazioni di
lettura da quelle di scrittura analizzando i flags.
Un esempio della struttura di una comunicazione PSP tra un
processore esterno e il PIC può essere schematizzata così :
-
Il processore master seleziona l' indirizzo del suo bus
a cui corrisponde il PIC. Questo provoca un livello basso sul pin !CS
-
il processore master scrive un dato che sarà catturato
nel latch del PSP in seguito al segnale !WR
viene generata
una richiesta di interrupt nel PIC
il programma di
gestione verifica il flag PSPIF e se settato, riconosce una chiamata
interrupt da PSP
la verifica dei
flag IBF e OBF permette di selezionare se si tratta di lettura o
scrittura. Se IBF è a 1, il programma legge PORTD con un movf
PORTD, W ; questo provoca il clear del flag IBF
il valore letto su PORTD non è lo stato fisico dei pin,
ma il dato che il master ha scritto e che è stato catturato nel buffer.
l' uscita dall' interrupt richiede la cancellazione del
flag PSPIF
Nel caso in cui il master scriva un secondo dato prima che
il PIC abbia letto il primo, il flag IBOV verrà settato, indicando un
overflow. Il primo dato è sovra scritto dal secondo e va perduto.
Nel caso di una lettura da parte del master:
-
il PIC prepara il dato da inviare scrivendolo nel PORTD.
Questo provoca un livello 1 sul flag OBF. In sostanza OBF indica che c'è
un dato pronto per essere inviato. OBF va testato prima di scrivere
PORTD per evitare di sovrascrivere un dato non ancora inviato
-
Quando il master seleziona il PIC e richiede una lettura
con !RD, il PORTD passa in uscita e il dato viene letto sul bus del
master. Il flag OBF viene cancellato.
-
Contemporaneamente viene inviata la richiesta di
interrupt che avvisa il PIC che è disponibile il buffer per caricare un
nuovo dato.
-
Ancora una volta PSPIF va cancellato da programma