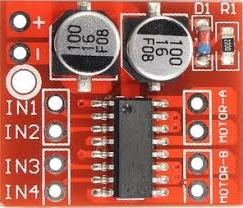
Sui soliti siti, da Bangood ad Amazon, sono da tempo in offerta
dei moduli per controllo di motori in cc di piccola potenza e con un costo assai
basso.
In alcuni casi viene pubblicizzato (con la solita disinvoltura
orientale...) come "dual
channel motor driver L298N", ma, ovviamente, non si tratta del chip
L298N, bensì di un integrato cinese siglato MX1508 prodotto da
Shenzen Guanghui Electronic, Sinotech Mixic Electronic e
probabilmente altri, in package SOP-16.
 |
Da tenere presente che la pubblicità dei venditori cinese può tratte
disastrosamente in inganno: L298N supporta 46V/4A, cosa molto diversa dai 10V/1-2A
di questo MX1508. E, in effetti, questa è la ragione per cui, in molti dei
pezzi visti, è stata cancellata la marcatura del componente !!!
Non è facile trovarne il foglio dati; una copia è disponibile qui,
in cinese.
|
Da notare che esistono anche un MX1208
con una corrente massima di 1.2A e un TC1208
di Shenzhen Fuman Electronic, che possono essere alternativi sul modulo.
 |
Alla data di stesura di queste pagine MX1508 è quotato 0.85$ per 10
pezzi fob Cina. |
In tutti casi si tratta di un driver per piccoli motori a spazzole, indicato per l'impiego
in giocattoli radiocomandati o comunque applicazioni a bassa tensione e a
batterie.
 |
Questo chip consente di comandare due canali con una configurazione H-bridge
e quindi può
pilotare motori in entrambe le direzioni in modo indipendente. Il circuito può funzionare da 1.8 a 5V per la parte
logica (Vcc), quindi si può interfacciare direttamente con logiche a 3
o 5V.
La tensione al carico deve essere di minore 10V (Vdd) ed è
separata per ognuno dei due canali e dalla alimentazione logica.
La corrente massima per il carico è di 0.8A continui, con un picco
possibile di 1.5-2A. Non sono previste limitazioni regolabili per la
corrente.
Va notato che i due canali sono disuguali, o meglio, il canale 1 viene
dichiarata una corrente massima di 2.5A e 1.5A per il canale 2;
probabilmente dipende dal fatto che il driver è pensato per
veicoli di cui il canale 1 è la trazione e il canale 2 è lo sterzo.
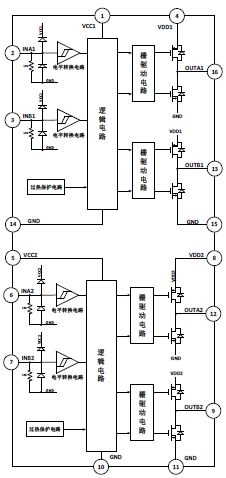
Gli ingressi sono schmitt trigger, con diodi di protezione e
pull-down. Le uscite sono push-pull con MOSFET N e P.
Il foglio dati indica una bassa tensione di conduzione dei
transistor di potenza e quindi un limitato riscaldamento.
La massima potenza dissipabile è 1.5W e il package ha una resistenza
termica di 80°C/W.
|
Per la sicurezza del prodotto in cui viene installato,
dispone di un sistema di limitazione della temperatura che blocca il
driver se questa supera un limite di pericolo. Quando la temperatura
rientra nella normalità, si ripristina automaticamente il
funzionamento.
Quindi, un corto circuito sulle uscite sarà limitato dal relativo
riscaldamento del componente.
Va da se che è meglio evitare volontariamente l'entrata in funzione della
protezioni, che scatta per una temperatura molto elevata del chip
(150°C).
Il foglio dati fornisce uno schema applicativo: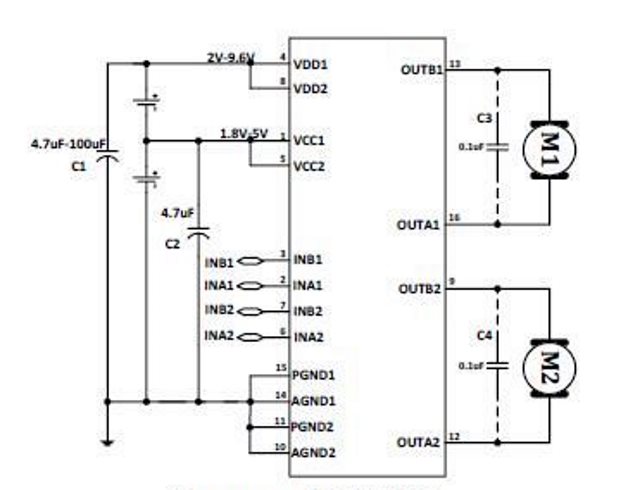
L'MX1508 non ha diodi free-wheeling integrati a parte quelli intrinseci dei
MOSFET e non ce sono sulla schedina, sebbene siano presenti in una application del produttore del
chip, il che fa presumere
che, all'inversione di direzione e avviamento si originino picchi di sovratensione.
Lo schema applicativo consiglia dei condensatori da 0.1uF in parallelo ai
motori, la minima soluzione da implementare.
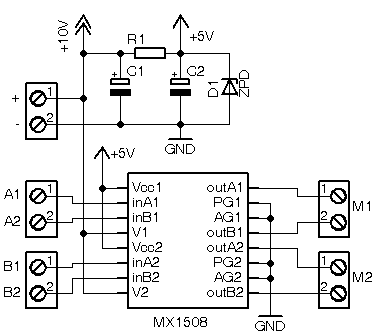
La schema elettrico del modulo ricalca l'application generica:
Sul modulo sono presenti due elettrolitici C1 e C2 (47 o 100uF-16V), una resistenza
da 220V e uno zener da 5.1V che garantisce il limite della tensione di
alimentazione all'integrato anche se la tensione di alimentazione è maggiore,
tipicamente 6-9V.
In questa scheda non è possibile avere la tensione logica separata da quella
dei motori. Le Vcc dei due canali sono collegate assieme, così pure le Vdd che
alimentano i motori. Sono collegate anche ad un unico punto le masse analogiche
e quelle digitali.
Gli ingressi e le uscite sono accessibili con forature passo 2.54 in cui si possono saldare
cavetti oppure spine o connettori, a seconda dell'applicazione ed inserire su
una breadboard. Da notare,
però, che, per chissà quale assurda (dis)ragione, il passo dei fori
dell'alimentazione è di poco maggiore di 2.54 e questo richiede di dover
forzare i terminali del connettore da inserire o utilizzare dei fili.
Non ci sono sullo stampato diodi di flyback e neppure i condensatori
antidisturbo previsti dall'applicazione, che è comunque il caso di saldare
esternamente ai capi dei motori oppure sullo stampato stesso.
Va notato che il foglio dati parla di 10V massimi per i motori e quindi non
è certo il caso di superare questo valore. In effetti, i giocattoli radiocomandati che hanno questo componente sono alimentati
al massimo a 6V-9V.
Si potranno ovviamente collegare altri tipi di carichi, come LED o
elettromagneti o resistori.
Il package SMD dispone di un pad termico sul lato inferiore che dovrebbe
utilizzare la faccia metallizzata del circuito stampato come radiatore. Nel caso
del nostro modulo, la superficie è molto ridotta; nel caso di applicazioni che
tendono a far scaldare il chip si potrà applicare un dissipatore per smd con un
adesivo termico.
Come solito di questi moduletti di progettazione cinese, l'eventuale
fissaggio meccanico è molto unfriendly: è costituito da un solo foro in una
posizione tale da entrare in conflitto con i connettori dell'ingresso.
Sono reperibili facilmente sul WEB librerie per Arduino e simili, anche se il
modulo è utilizzabile senza alcuna difficoltà con qualsiasi microcontroller.
La logica di funzionamento è banale:
| INAx |
INBx |
OUTAx |
OUTBx |
funzione |
| L |
L |
Z |
Z |
fermo |
| H/PWM |
L |
H |
L |
rotazione oraria |
| L |
H/PWM |
L |
H |
rotazione antioraria |
| H |
H |
L |
L |
freno |
L/H sono intesi riferiti alla Vcc per INA/INB e alla V1/V2 per OUTA/OUTB.
Se gli ingressi non sono collegati a nulla, le uscite sono ad alta impedenza
e i motori non sono alimentati; questa condizione di sicurezza è il default
dovuto ai pull-down integrati.
Modulando uno degli ingressi con un segnale PWM si potrà ottenere una
variazione della velocità del motore o della luminosità dei LED collegati alle
uscite.
Precauzioni.
Dalle prove fatte il chip risulta abbastanza robusto, ma si devono decisamente
evitare alcune condizioni critiche che sono cause certe di danno permanente:
- non superare la tensione massima di alimentazione
- non invertire la tensione di alimentazione
- non creare situazioni di corto circuito sulle uscite
|