La connessione I2C
I2C
(Inter Integrated Connection) è uno standard per lo scambio dati con una
interconnessione seriale sincrona, studiato da Philips (attualmente NXP) che ne
detiene i diritti. Analogo a I2C è SMBus (System
Management Bus) di Intel, con struttura simile, ma con qualche differenza sulle soglie dei
livelli logici.
Esiste poi un CBUS che però presenta varie differenze anche
hardware. Troviamo
anche costruttori che realizzano dispositivi denominati
genericamente 2-Wire Serial Interface, con una compatibilità I2C.
Comunicazioni del genere I2C sono presenti in molte applicazioni, ad esempio
nell' interfaccia tra schede video e monitor (VGA, HDMI) o per l' accesso
ai serial presence detect (SPD) delle DIMM e altri componenti per sistemi
computerizzati, ecc.
Come dice il nome, si tratta di una connessione tra circuiti integrati,
prevista per collegare vari dispositivi presenti su circuito stampato o all'
interno di una apparecchiatura.
Il sistema include la possibilità di avere più dispositivi sia Master (multi-Master)
che Slave, collegati tra di loro utilizzando solamente due conduttori, uno per
i dati ed uno per il clock.
Siccome sia Master che Slave possono trasmettere e ricevere dati, la linea
dati è bi-direzionale.
E lo è anche il clock, in quanto sarà il
dispositivo in linea in quel momento a comandarlo.
In effetti, secondo la definizione originale del protocollo, sono identificati
i seguenti elementi:
| Transmitter |
il dispositivo che sta inviando dati sul bus |
| Receiver |
il dispositivo che riceve dati dal bus |
| Master |
il dispositivo che inizia e termina un trasferimento
dati.
Il Master è il
dispositivo che può prendere in carico il bus in un dato momento e che sta
generando il clock della trasmissione. |
| Slave |
il dispositivo indirizzato dal Master.
Sono dispositivi Slave quelli che non possono comunicare tra di
loro, ma solo con un Master. |
| Multi Master |
più di un Master che possono cercare di avere il
controllo del bus senza che siano corrotti i messaggi in linea |
| Arbitraggio |
l' operazione che assicura ad un solo Master alla
volta l' accesso al bus |
| Sincronizzazione |
procedura per sincronizzare due o più
dispositivi. |
Siccome I2C è multi-Master,
un dispositivo che opera come Master potrà operare anche come Slave di un
altro Master. I Master sono solitamente dei microcontroller e questo
significa che più microcontroller possono essere collegati al bus e comunicare
sia tra di loro che con eventuali Slave.
Per riassumere, I2C è un sistema seriale sincrono con due linee
bi-direzionali, multi-Master.
- la line dati è chiamata SDA (Serial DAta) e
- la linea del clock è chiamata
SCL (Serial CLock).
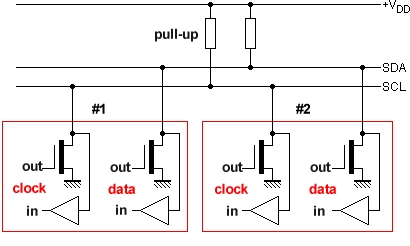 |
Dovendo consentire accessi bi-direzionali alle linee fisiche di trasporto
del clock e dei dati, ne risulta che la configurazione tipica è costituita da
periferiche con interfaccia open drain, o open collector, "appese" a
linee dotate di pull-up (wired-AND). E' una configurazione single-ended con il riferimento alla
tensione di alimentazione. I vari dispositivi sono semplicemente
aggiunti collegandoli ai due conduttori del bus. |
I pull-up, dunque, non sono opzionali, ma sono indispensabili, in quanto le linee,
se non mandate a livello basso alla chiusura degli open drain, sarebbero ad un
livello logico indeterminato e quindi inaccettabile dagli ingressi di
ricezione.
Questa soluzione circuitale consente di aggiungere (entro i limiti del
collegamento fisico) periferiche al bus senza modifiche, consentendo una
scalabilità verso un numero maggiore di dispositivi. Sono stati
prodotti anche line extender che consentono di superare le brevi distanze costituite da cablaggi all' interno di
una apparecchiatura o anche buffer in grado di portare i segnali fuori di essa. Per contro, la bi-dierzionalità delle linee rende più
complessa la bufferizzazione e l' isolamento galvanico rispetto a bus con
linee mono direzionali.
La soluzione open collector (o open drain) fa si che, quando uno dei
dispositivi manda in conduzione la propria uscita, essa forza a livello basso
la linea (livello
logico zero); nel momento in cui l' uscita si disabilita, la linea viene
riportata a livello alto (livello logico uno) dal pull-up.
La configurazione
ha il vantaggio di non avere in nessun caso conflitti hardware, dato che
nessun
dispositivo può forzare il livello logico alto: al massimo, se due
dispositivi vanno in conduzione nello stesso istante, non si verifica alcuna
sovracorrente, dato che entrambi non sono altro che interruttori in parallelo
e la corrente viene limitata dal pull-up.
Ovviamente il pilotaggio
del bus non può essere effettuato da GPIO generici che tipicamente hanno una uscita puh-pull, come
la gran parte dei pin dei microcontroller: se un dispositivo push-pull sul bus
porta
la sua uscita a livello alto mentre un' altro lo forza a livello basso, si
verifica un corto circuito tra la tensione di alimentazione e la massa
attraverso i semiconduttori di pilotaggio delle uscite.
Dovendo utilizzare questo genere I/O, il livello alto richiederà il passaggio
del pin da uscita a ingresso (ad alta impedenza), lasciando al solo pull-up il
compito di attribuire alla linea il giusto livello alto.
Tuttavia esistono
microcontroller con I/O open drain o programmabili come tali.
Mancando questi
sarà opportuno ricorrere a componenti esterni.
In sostanza, i conduttori del bus possono assumere solo due stati:
- float
high quando nessun dispositivo è in conduzione; la tensione positiva
è assicurata dai pull-up
- driven low
quando un open drain (o open collector) viene chiuso, mandando la linea a
livello basso.
Ovviamente occorre che solamente una unità sia in trasmissione in un dato
istante, dato che se più unità agiscono contemporaneamente portando a
livello basso la linea, non si verificano sovracorrenti, ma il contenuto dell'
informazione va perso. Questo richiede che sia verificato lo stato di linea
libera prima iniziare la trasmissione.
Per questa ragione i dispositivi non invertono la loro direzione a seconda che
siano in trasmissione o ricezione, ma dispongono su ognuna delle linee di uno
switch per la trasmissione (transistor bipolare open collector o MOSFET open
drain) e, contemporaneamente, un gate di ricezione, tipicamente Schmitt
trigger per minimizzare il rumore.
Questa architettura è indispensabile non solo per la verifica dello stato
idle della linea, ma per l' ulteriore ragione che i livelli logici sulle due
linee non costituiscono solo la trama della trasmissione, ma, con particolari
configurazioni, forniscono degli stati che il sistema identifica come
handshake, detti "condizioni", che saranno decritti più avanti.
La comunicazione
si svolge al livello dell' alimentazione dei circuiti integrati, che va
tipicamente dai classici 5V al minimo supportato dai dispositivi collegati, ad esempio
3V, anche se non ci sono teoricamente limiti al valore della Vdd.
Dato che, però, i dispositivi non solo trasmetto in linea, ma anche ricevono
nello stesso tempo, se sullo stesso bus sono collegati dispositivi alimentati a tensioni diverse
occorrerà introdurre traslatori di livello o altri artifici hardware per
adattare i livelli logici, anche se dispositivi recenti hanno ingressi che
supportano una ampia gamma di tensioni.
Su un bus di questo genere non è consigliabile inserire altro che dispositivi
I2C, dato che il cambio di stato delle linee ha funzione
di segnalazione; l' eventuale inserimento di altri dispositivi richiede la
massima cautela.
I2C prevede il supporto per una ampia gamma di frequenze di
clock:
| modo |
data rate |
| standard-mode |
Sm |
100 kbps |
| fast-mode |
Fm |
400 kbps |
| fast-mode plus |
Fm+ |
1 Mbps |
| hig speed mode |
Hs |
3.4 Mbps |
Trattandosi di una comunicazione sincrona con il clock separato dai dati, la
precisione dell' oscillatore è relativa e, al limite, il clock può variare
durante la trasmissione senza perdita del dato, tanto che il protocollo
prevede una azione, detta clock stretching, in cui l' unità in
trasmissione rallenta il clock.
Questo consente di mescolare su uno stesso bus unità differenti come
prestazione e non far dipendere la larghezza di banda solamente da quella più
lenta.
Come è evidente, sul bus potranno comunicare solamente due dispositivi
alla volta in una modalità half-duplex; l' accesso di più periferiche in
trasmissione è controllato ed impedito dai sistemi di handshake, mentre tutti
i dispositivi collegati al bus si trovano sempre e comunque in stato di
ricezione in attesa di essere selezionati con il proprio indirizzo oppure di
entrare in trasmissione come Master nel momento in cui le linee siano libere; lo standard stabilisce sistemi di general call per inviare
particolari messaggi a tutti i dispositivi sul bus contemporaneamente.
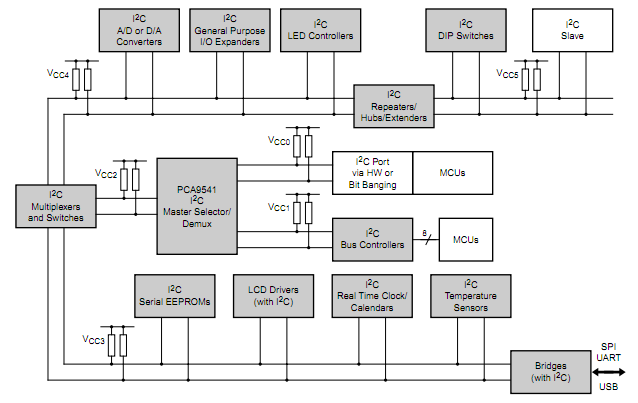
Il bus I2C
Philips-NXP ha previsto il bus per collegare ogni genere di
periferica in modo seriale ad uno o più microcontroller che governano un
sistema o una apparecchiatura.
Le applicazioni spaziano dagli apparecchi TV ai personal computer, dagli
strumenti di misura ai sistemi di supervisione di processo.
La pubblicazione UM1024
esemplifica un bus complesso dove sono presenti più microcontroller e una
suddivisione del bus stesso in sezioni attraverso multiplexer e repeater.
Philips ha infatti realizzato una gamma molto ampia di funzioni per I2C
, non solo periferiche come I/O expander e EEPROM, ma anche elementi di
supporto a bus complessi, come multiplexer, repeater, buffer, level translator,
ecc.
|