Programmazione del modulo MSSP
Nell' inizializzazione del modulo MSSP occorre tenere presenti vari
parametri.
In primo luogo, la modalità operativa, ovvero se Master o Slave. Questo si
effettua con i bit SSPM3:0 di SSPCON1.
La scelta comprende anche la sorgente del clock (in modo Master) e l' uso del
pin SS in modo Slave.
In modo Slave, se SS viene utilizzato, il pin
corrispondente dovrà essere definito come ingresso con il relativo TRIS. Se
non viene usato, è libero per altre applicazioni.
Sia in Slave che in Master occorre ricordare che i pin dedicati al bus SPI vanno
settati correttamente nei relativi TRIS, per cui, in modo Master SDO è una
uscita, come SCK, mentre SDI è un ingresso.
Questo è obbligatorio.
Va da se che in modo Slave SCK sarà invece l' input del clock fornito dal
Master esterno.
|
In particolare, per il modulo MSSP dei PIC enhanced:
4= 1
come ingresso
SDO deve avere TRISC, 5= 0 come uscita
SCK (in modo Master) deve avere TRISC, 3 = 0
(uscita)
SCK (modalità Slave) deve avere TRISC, 3 = 1
(ingresso)
SS (solo in modo Slave),
se usato, deve avere TRISA,5 = 1 (ingresso)
|
Al POR, SDI è per default una uscita, ma è opportuno prevedere comunque
per sucurezza, nel setup degli I/O per il modulo MSSSP, la sua configurazione
come uscita, setup che è possibile non avvenga subito a l POR, ma in fasi
successive dove c'è stata una qualche manipolazione degli I/O.
Qualsiasi funzione della porta seriale che non è
desiderato può essere sovrascritto da programma nel corrispondente
registro dati direzione (TRIS) sul valore opposto.
Ovvero:
- non utilizzando la linea SDI, RC4 può essere programmato come uscita ed
utilizzato come GPIO generico
- avendo la necessità di escludere l' uscita SDO, mandandola in una
situazione che elimina conflitto su un bus multi periferiche, si potrà
programmare RC5 come ingresso
- programmando RC3 come ingresso in modo Master non si otterrà alcuna
uscita del clock.
Ovviamente RC3 non dovrà essere programmato come uscita nel caso in cui
il PIC sia uno Slave, onde evitare conflitti sul bus del clock con il
Master e possibili guasti ai componenti.
In modo Master il clock della trasmissione può essere
una frazione del clock principale (/64, /16, /4), il che permette un clock
massimo di 10 MHz con clock principale a 40 MHz. Ovviamente il clock dovrà
essere quello che la periferica e la connessione relativa possono supportare.
Nel caso in cui nessuna delle tre opzioni dipendenti dal clock principale è
utilizzabile, sarà possibile impiegare la metà del clock fornito da Timer2.
L' uso di Timer2 in questo contesto è relativo esclusivamente alla frequenza
in uscita, che sarà necessario determinare con l' opportuna programmazione
dei registri del Timer stesso. La cosa non influisce sull' uso del timer in
altre parti del programma, ma, ovviamente, un cambio della frequenza generata
si rifletterà sulle operazioni di MSSP.
La seconda importante azione è
quella di determinare il modo di funzionamento della comunicazione SPI con i
bit CKE e CKP.
La definizione di uno dei 4 possibili modi dipende dalla periferica con cui si
vuole colloquiare. In un sistema multi-Slave con abilitazione degli Slave
attraverso chip select, potranno essere usate periferiche con modi diversi, in
quanto i due bit si possono scrivere in ogni momento prima della
ricezione/trasmissione.
Per
abilitare la porta seriale si utilizza il bit SSPEN (SSPCON<1:5>).
Per reimpostare o riconfigurare una diversa modalità
SPI occorre disabilitare SSPEN, reinizializzare SSPCON come richiesto e quindi
riabilitare SSPEN.
Vediamo un breve esempio di setup del modulo MSSP come Master:
|
#define
CS PORTA,5
;utilizza RA5 come I/O di chip select della periferica
.....
;
configurazione MSSP
bsf
LATA, 5 ;
preselect CS a livello alto
; CS I/O come uscita
bcf
TRISA,5 ; pin CS come
uscita
bcf
TRISC,3 ; SCK come uscita (Master)
bcf
TRISC,5 ; e SDO
come uscita (Master)
movlw
0x40
; Modo 1,1, sincro a metà
movwf
SSPSTAT
movlw
0x31
; Modo 1,1 SPI Master, 1/16 Tosc, SPI abilitato
movwf
SSPCON1 |
Abbiamo visto come MSSP sia costituito da un registro di scorrimento
per la trasmissione/ricezione (SSPSR) e da un registro di buffer (SSPBUF).
Attraverso SSPSR i dati sono movimentati dentro e fuori il PIC,
emettendo per primo l' MSb (e, in ricezione, ricevendolo per primo).
In ricezione, una volta ricevuti gli 8 bit del dato, il byte viene spostato al registro
SSPBUF e la situazione è comunicata settando ilo flag BF (SSPSTAT <0>) e l'interrupt flag
bit SSPIF.
Il doppio buffering dei dati ricevuti permette al prossimo byte di arrivare in
SSPSR mentre l' unità centrale sta leggendo il precedente contenuto in SSPBUF.
Qualsiasi scrittura
del registro SSPBUF durante la trasmissione/ricezione dei dati verrà ignorato e la collisione di scrittura
sarà rilevata dal flag WCOL (SSPCON1 7), che sarà necessario cancellare da software
in modo da poter individuare questa situazione anomala. Quando l' applicazione si aspetta di ricevere dati validi, è consigliabile leggere il SSPBUF prima che il prossimo byte di dati da trasferire
sia passato in SSPBUF: il bit di buffer pieno, BF (SSPSTAT <0>), indica quando SSPBUF è stato caricato con i dati ricevuti,
così da evitarne la sovrascrittura. Quando viene letto SSPBUF, il bit BF è
riportato a 0 automaticamente.
I dati ricevuto possono essere irrilevanti se il PIC è solo un trasmettitore
e, in tal caso, saranno scartati.
In generale, l'interrupt di MSSP viene utilizzata per determinare quando
è stata completata la trasmissione/ricezione e l'SSPBUF deve essere letto e/o scritto.
Comunque è possibile utilizzare un polling software per evitare una collisione di scrittura
o lo stato di buffer pieno. Il registro SSPSTAT indicherà le varie condizioni di stato.
Nell'esempio viene illustrato il caricamento di SSPBUF (SSPSR) per la trasmissione dati.
SSPSR non è direttamente accessibile e viene raggiunto solo attraverso SSPBUF.
|
LOOP BTFSS
SSPSTAT, BF ;dato ricevuto o trasmissione
completata?
BRA LOOP
;no - loop
MOVF SSPBUF, W ;copia
SSPBUF in WREG
MOVWF
RXDATA ;salva dato
in RAM
MOVF
TXDATA, W ;muove dato da trasmettere
in W
MOVWF SSPBUF
;trasmette dato |
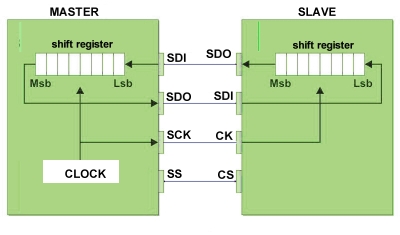
Collegamento tipico
 |
La figura mostra una tipica connessione tra due unità SPI, in questo
caso due microcontroller, uno operante come Master e uno come Slave.
Il controller master (processore 1) avvia il trasferimento dei dati inviando il segnale
SCK.
|
I dati sono spostati dai registri a scorrimento sul fronte del
clock programmato (entrambi i processori devono essere programmati per
lo stesso modo di funzionamento con CKP).
Il valore attribuito ai dati ( significativi o dummy) dipenderà dal software applicativo. Questo porta a tre scenari per la trasmissione dati:
- Invio dati dal Master allo Slave: il Master invia dati significativi –
lo Slave invia dati fittizi (scarico del suo shift register)
- Full duplex: il Master invia dati significativi – lo Slave invia dati
significativi
- Lettura dati da parte del Master: il Master invia dati fittizi (generando
il clock, scarica il suo shift register– lo Slave invia i dati
significativi
Il Master può avviare il trasferimento dei dati in qualsiasi momento, perché esso controlla la
SCK. Nel modo Master i dati sono trasmessi non appena viene scritto il registro SSPBUF.
Se l'operazione di SPI è solo ricevere, l'output SDO potrebbe essere disattivato,
programmando il pin come input.
Il registro SSPSR continuerà a spostare i bit presenti sul pin SDI secondo il
clock. Appena un byte è ricevuto viene caricato nel registro SSPBUF e vengono
impostati il flag di interrupt e il bit di stato. La condizione potrebbe essere utile
anche nelle applicazioni di ricevitore come "Line Activity Monitor".
La polarità del clock è selezionata programmando opportunamente il bit CKP
(SSPCON<1:4>). Le possibili configurazioni danno origine a diverse forme
d' onda come visibile nei diagrammi seguenti.
Nel modo Master, la frequenza di clock (bit rate) è programmata dall' utente
solo sul Master, dato che gli Slave dipendo da questo solo clock.
Siccome è l' utente a dover scegliere quale polarità e fronte del
clock va impiegata, occorre prestare attenzione alle esigenze della
periferica collegata.
Una prima variabile è il livello a cui sta la linea di clock quando non
ci sono trasmissioni. Questa condizione di riposo si definisce idle.
Si può quindi avere uno stato idle alto o basso programmando il
bit CKP (ClocK Polarity) in SSPCON1.
A seconda delle richieste della periferica, il sincronismo tra il dato e
il clock può essere effettuato sul fronte di salita o su quello di
discesa del clock stesso.. Questo si ottiene con la programmazione del
bit CKE (ClocK Edge). Le 4 possibili variazioni sono
schematizzate nel diagramma seguente.
Quanto sopra è valido sia nell' impiego come Master, sia in quello
come Slave. Va aggiunto che in modo Slave, i dati sono trasmessi e ricevuti sugli impulsi di
clock esterno al pin SCK e quindi la programmazione di CKE e CKP dovrà essere
adeguata. Inoltre il PIC in modo Slave, se è selezionata l' opzione che
attiva SS, potrà comunicare solamente se questo pin è a livello
basso.
Se si seleziona l' uso di SS (abilitato SSPCON1 <3:0> = 04h) si permette
una modalità Slave automatica: quando il pin SS è basso, trasmissione e ricezione sono
attivate e il pin SDO è comandato dall' uscita dello shift register. Quando il pin SS va
a livello alto, il pin SDO non è più comandato e la trasmissione è sospesa,
anche se nel mezzo di un byte trasmesso; il pin passa in stato floating. In
queste condizioni resistori di pull-up o pull-down esterni possono essere
desiderabili, a seconda dell' applicazione, onde non lasciare floating la linea.
Quando l'ultimo bit è agganciato, viene impostato il flag di interrupt SSPIF.
Prima di attivare il modulo in modalità Slave SPI, la linea di clock deve corrispondere
al proprio stato inattivo. Questo può essere osservato leggendo il pin SCK. Lo
stato di idle è determinato da CKP (SSPCON1 4).
Se lo slave è in stato di Sleep, la ricezione dei dati è una fonte per il
wake-up.
Nota :
- Quando l'interfaccia SPI è in modalità Slave con SS abilitato (SSPCON1 <3:0> = 0100), il modulo SPI resetterà se il pin SS
va a livello alto.
- Se l'interfaccia SPI viene utilizzata in modalità Slave con CKE=1, allora deve essere attivato il controllo del pin di SS.
|
Quando viene reimpostato il modulo SPI, il contatore di bit è resettato. Questo può essere fatto sia
portando il pin SS ad un livello, sia de selezionando il bit SSPEN.
Il diagramma seguente riporta le forme d'onda di sincronismo dello Slave:
Il modo 0,0 gestisce la linea di clock praticamente all' opposto del modo
1,0.
Osserviamo anche che con SMP=0 il campionamento del dato è fatto alla metà del
tempo di durata del bit sulla linea SDI.
Il flag SSPIF e il trasferimento del dato da SSPSR a SSPBUF avvengono dopo la
ricezione dell' ultimo bit. Il livello basso su SS abilita la ricezione.
In particolare, se il bit CKE viene impostato a 0
Osserviamo che lo stato di SDO permane sul livello dell' ultimo bit trasmesso
fino a che non viene rimossa l' abilitazione di SS.
Per CKE = 1. In questo caso si deve osservare che la funzione SS non è
opzionale e va abilitata ed utilizzata.
SETUP di MSSP
Un breve esempio di setup dell' MSSP come Slave:
|
; configurazione MSSP
bsf
LATA, 5 ;
preselect CS a livello alto
bcf
TRISA,5 ; pin CS come
uscita
bsf
TRISC,4
; pin SDI come input
bsf TRISC,3
; SCK come ingresso (Slave)
bcf
TRISC,5 ; e SDO
come uscita (Slave)
movlw
0x40
; Modo 1,1, sincro a metà
movwf
SSPSTAT
movlw
0x34
; Modo 1,1 SPI Slave, SS abilitato, SPI abilitato
movwf
SSPCON1 |
SPI a due fili e altre configurazioni
Alcune periferiche utilizzano una sola linea dati bi
direzionale, per cui sono necessari solamente questa linea e il clock, con l'
eventuale SS. Si tratta quindi di una comunicazione half duplex, dove di volta
in volta una o l' altro dei dispositivi trasmette o riceve su questa linea.
Il modulo MSSP non ha una struttura per trattare questa configurazione in modo
diretto, ma si può operare semplicemente collegando il pin SDO al pin SDI.
Si deve considerare che, quando una unità trasmette, la linea
bi direzionale viene comandata dal suo pin SDO; per questa ragione lo standard
Motorola prevede che le linee di trasmisisone vadano in 3-state se la
periferica non è selezionata. Questo serve ad evitare un
conflitto sul bus nella sfortunata circostanza in cui due elementi
tentassero contemporaneamente di trasmettere.
Utilizzando il PIC come ricevitore, il pin
SDO non deve trasmettere; ci sono due soluzioni:
-
Nel caso di impiego del PIC come Slave, l' uso di SS implementa
automaticamente la funzione di 3-state di SDO quando il microcontroller Slave
non è selezionato (per altro obbligatorio se si è programmato CKE=1).
-
però è possibile che per CKE=0 in Slave SS non
venga utilizzato. Quindi, in questo caso, e per la modalità Master,
la soluzione è quella di configurare il pin SDO come input. Questo disabilita la trasmissione
e il pin SDO come input è un carico trascurabile per la linea.
Si opererà viceversa quando cambia la direzione
della comunicazione.
Essendo sempre un ingresso, SDI può non crea conflitto sul bus.
Analogo problema quando su un bus sono mescolati dispositivi con linee in tree-state a dispositivi
periferici senza questa funzione. Il 3-state delle uscite è un punto fondamentale nel
collegamento delle periferiche su linee comuni SDI e SDO.
Se nel PIC, con i metodi sopra indicati, è sempre possibile
disabilitare SDO, esistono periferiche che non dispongono di uscite
3-state; in questo caso l' AN
1879 di MAXIM offre una possibile soluzione.
 |
Se l'applicazione richiede che un mix di 3-state e non sullo stesso bus SPI, i dispositivi
non 3-state possono essere convertiti aggiungendo un commutatore analogico o
un gate tree-state tra il pin di emissione dei dati (SDO o DOUT) e il pin di MISO
del Master.
Lo switch è comandato dal CS che seleziona il dispositivo e quindi
attiva la DOUT allo stesso tempo. Sono adatti switch analogici come MAX4595 e MAX4502
(package SC-70 e SOT-23). In alternativa, potrebbe essere utilizzato un terzo di uno switch SPDT triplo MAX4053 o
74HC4053, oppure buffer tree-state Fairchild TinyLogic NC7SZ125 e TI
SN74AHC1G125 o anche il classico 74HC125 (che contiene 4 buffer in un unico
package).
|
Per contro, in una configurazione daisy chain in cui si utilizzi il
PIC come Slave,
occorrerà una gestione differente della comunicazione, dato che deve essere
assicurata la circolazione dei dati sull' anello. In questo caso non sarà
possibile configurare CKE=1 poichè questo, in modo Slave, obbliga all' uso di
SS.
Operatività in power management
Il clock principale, in modalità a bassa potenza, potrebbe essere di valore
inferiore a quello previsto per la comunicazione SPI e va considerato che, in caso di modalità di sospensione, tutti
i clock sono interrotti.
In modalità Idle, un clock viene fornito per le periferiche: quel clock dovrebbe essere la fonte primaria,
il clock secondario (oscillatore a 32,768 kHz) o la fonte INTOSC. Nella maggior parte dei casi, la velocità che il
Master usa per il clock non è importante (se non ai fini della velocità di
trasmissione) in quanto gli Slave si sincronizzano su questo clock. Tuttavia, l'
impatto reale di questa condizione dovrebbe essere valutato caso per caso.
Se sono attivate
le funzioni di interrupt per MSSP, esse sono in grado di svegliare il controller dalla modalità di
sospensione o da una delle modalità inattive, quando il master ha completato l'invio
del dato in corso. Se non si desidera un'uscita dalla modalità di sospensione o
Idle, le funzioni di interrupt devono essere disattivate.
Se è selezionata la modalità di sospensione, tutti gli clock del modulo sono interrotti e la trasmissione/ricezione rimarrà
sospesa fino al wake up.
In modalità Slave, il registro a scorrimento di trasmissione/ricezione
opera in modo asincrono rispetto al microcontroller. Questo permette al dispositivo di essere inserito in qualsiasi
modalità di gestione del consumo energetico durante la ricezione di dati. Quando sono stati ricevuti tutti gli 8 bit,
l' interrupt del modulo MSSP verrà impostato e se abilitato, provvederà al
wake up del microcontroller.
SPI e interrupt
Un solo flag identifica la condizione di interrupt del moduli MSSP
- SSPIF PIR1<3> questo bit va a 1 se la
trasmissione o la ricezione sono completate.
Va cancellato da programma.
Prima di abilitare l' interrupt di MSSP è opportuno cancellare questo flag per
evitare false chiamate.
Per il resto, la gestione dell' interrupt è analoga a quella degli altri
moduli; sono presenti:
- SSPIE PIE1<3> a livello 1 abilita l' interrupt di MSSP
- SSPIP IPIR1<3> a livello 1 attribuisce la priorità
alta all' interrupt di MSSP, se
IPEN RCON<7> è abilitato
Essendo un interrupt periferico, quello di MSSP richiede l'
abilitazione sia di GIE/GIEH che di PEIE/GIEL.
I registri interessati alla comunicazione SPI
Il foglio dati riporta come al solito un elenco dei registri che sono
interessati dalle operazioni del modulo MSSP per le operazioni SPI.
Il fondo bianco delle celle identifica quali registri e bit vanno considerati
quando si affronta la programmazione (mentre le celle con fondo grigio indicano
bit o registri non interessati).
La gestione dei bit dei registri PIR1/IPIR1/PIE1
sarà considerata dove necessaria, sempre ricordando che i flag dei registri PIR
sono testabili anche in polling e vanno azzerati da programma quando necessario.
La collocazione dei flag e dei bit nei registri suddetti indica che gli
interrupt fanno parte del gruppo dei periferici e la loro chiave di
abilitazione, nel caso di interrupt senza priorità, è il bit PEIE
di INTCON.
Silicon Errata
Il modulo MSSP si trova ad avere possibili problemi dovuti alla
realizzazione. Questi problemi sono riportati in documenti chiamati Errata
da Microchip; essi individuano i problemi e suggeriscono possibili soluzioni.
Anche nel caso della famiglia 18F43/2321 il documento DS80285b riporta un
problema rilevato proprio sul modulo MSSP.
Nel modo Slave con SS abilitato (SSMP3:0=0100) e CKE=0, il tempo minimo tra
il fronte do discesa di SS e il primo fronte di SCK deve essere maggiore di
quello specificato nel parametro 70 (table 26-16 del foglio dati), ovvero al
minimo 3 Tcy.
Questo tempo minimo è lo stesso necessario tra SS a livello basso e la
scrittura di SSPBUF.
In questo caso il modulo MSSP funziona correttamente. Se, invece, il tempo tra
la selezione dello Slave con SS e il primo impulso del clock è minore ci
potranno essere problemi nell'invio del dato. Problemi che non si verificano se
SSPBUF viene caricato prima che lo Slave sia selezionato.
| Da osservare che gli Errata
sono relativi solamente ai dispositivi con ID e revisione indicate dallo
stesso documento. |
E' pratica indispensabile, scelto un dispositivo, non solo controllarne il
foglio dati, ma anche verificare l'esistenza di Errata. Si deve dire che
i problemi descritti da questi documenti sono assai spesso marginali ed è
possibile che l' utente nella sua applicazione non li incroci mai. Ma, in ogni
caso, dato che sono tali da creare situazioni in cui il debug diventa
drammatico, è opportuno tenerne conto.
T&T : SPI per i PIC
Questi sono alcuni punti salienti di cui occorre tener conto usando il modulo
MSSP in SPI.
- SSP e MSSP per le applicazioni SPI sono analoghi
- Il modulo MSSP controlla sia la comunicazione SPI che la I2C,
ma può essere configurato solamente per una alla volta. Nel caso
occorra avere sullo steso PIC entrambi i bus si dovrà scegliere un modello
dotato di almeno 2 moduli MSSP.
- Nei PIC, la linea SS è funzionale solamente quando l' MSSP è
configurato come slave. Essa controlla il gate della linea SDO, inibendo
se a livello alto, l' uscita,
oltre al clock allo shift register .
-
Sia in Slave che in Master occorre ricordare che i pin dedicati al bus SPI vanno
settati correttamente nei relativi TRIS, per cui SDO è una
uscita, mentre SDI è un ingresso. SCK è una uscita in modo Master, ma un
ingresso in modo Slave
- Per CKE = 1 in modo Slave la funzione SS non è
opzionale e va abilitata ed utilizzata.
- Il foglio dati consiglia, prima di attivare il modulo in modalità Slave,
di verificare che la linea di clock deve corrispondere
al proprio stato inattivo (idle). Questo può essere osservato leggendo il pin
SCK. Lo
stato di idle è determinato da CKP (SSPCON1 4).
- Verificare le caratteristiche delle periferiche collegate per determinare
con esattezza il modo di funzionamento rispetto al clock e la polarità
del chip select.
- resettare SSPIF prima di abilitare l' interrupt
- Per quanto riguarda i flag di controllo:
- BF viene resettato automaticamente alla lettura di SSPBUF
- WCOL e SSPOV vanno cancellati da programma
- Dovendo cambiare parametri al modulo:
- disabilitarlo con SSPEN=0
- effettuare le modifiche volute
- riabiltare il modulo
SPI + C
I linguaggi C per i PIC forniscono librerie di funzioni per il setup
e l' uso del modulo MSSP