Il modulo MSSP come I2C
Nei PIC il modulo MSSP (Master Synchronous Serial Port - port seriale sincrono con
funzione di master) è in grado di svolgere le funzioni di Master e di Slave
per il bus I2C (Inter Integrated Circuit).
Questa funzione di interfaccia con il bus comprende il supporto alla
general call e fornisce una sorgente di interrupt per gli eventi di Start e
Stop, oltre a poter gestire indirizzi a 7 e 10 bit.
Inoltre può essere programmato per interfacciarci al SMBus, che ha
caratteristiche hardware leggermente diverse da I2C.
I2C, introdotto da
Phlips-NXP negli anni '90, è uno dei sistemi
più diffusi di comunicazione seriale sincrona su brevi distanze ed esiste
una ampia gamma di periferiche, tra cui EEPROM, driver per
display, AD e DA converter, RTC, ecc.
Il modulo MSSP dispone di alcuni registri di controllo per I2C,
con cui l' utente
programma le varie funzioni e gestisce la comunicazione. I moduli MSSP delle
varie famiglie di PIC sono analoghi a quello qui descritto, per cui quanto
detto può essere esteso in senso generale.
Da notare che alcuni PIC dispongono di modulo SSP (Synchronous Serial Port)
che si differenzia da MSSP in quanto non supporta il modo Master in I2C.
I2C è un protocollo sincrono, dove l' unità che trasmette sul bus fornisce
il clock.
Ne è possibile anche una emulazione software usando generici I/O e comandandone i livelli al momento appropriato, ma il codice di una tale
emulazione, al di la di un bit-banging tra il microcontroller e una
periferica, non è banale. In particolare se esso deve essere scritto in un modo non-blocking
(ovvero in modo tale da permettere al processore di fare altre cose durante la comunicazione I2C).
Ne risulta che l' uso del modulo integrato fa si che sia decisamente più
semplice il programma dello scambio dati e rende possibile una gestione in
interrupt.

Va notato che il modulo MSSP fornisce un completo supporto hardware
al protocollo
I2C, sia
come Master che come Slave. In particolare, la logica integrata
riconosce automaticamente le condizioni sul bus, genera condizioni con
le dovute temporizzazioni, automatizza la trasmissione e ricezione di
byte nello shift register, gestisce la sincronizzazione del clock e l'
arbitraggio, fornisce flag e interrupt per i vari eventi
significativi.
Però la
risposta ai vari eventi e, in generale, la
logica di gestione della comunicazione I2C
sono carico del software scritto dall' utente. |
I2C
La trasmissione dati tra i dispositivi del bus I2C
avviene su due
conduttori bidirezionali, open collector (o open drain) sostenuti da
pull-up.
- La linea dati è indicata come SDA e che fa capo
tipicamente al pin RC4
- La linea del clock, indicata come SCL, fa capo al pin RC3
Varie pagine con maggiori dettagli sul protocollo e le sue
caratteristiche le
trovate qui.
Il modulo
MSSP può operare come interfaccia
SPI o I2C e i pin dedicati
alla comunicazione sono gli stessi:
| Pin |
Funzione |
Note |
| SPI |
I2C |
SPI |
I2C |
| RC5 |
SDO |
- |
Serial Data Out |
non utilizzato |
| RC4 |
SDI |
SDA |
Serial Data In |
dati - bi direzionale |
| RC3 |
SCK |
SCL |
Serial Clock |
clock - bi direzionale |
| RA5 |
/SS |
- |
Slave Select (negato) - opzionale |
non utilizzato |
Poichè i due bus non sono
compatibili, un singolo modulo SSP potrà operare solo o come SPI o
come I2C. |
Dovendo utilizzare contemporaneamente entrambe le interfacce,
occorrerà scegliere uno dei tanti PIC dotato di due o più moduli
MSSP, oppure
utilizzare il modulo per I2C
ed emulare SPI da software.
Va da se che le possibilità funzionali del modulo sono maggiori di
quello che sarebbe ragionevolmente possibile con una emulazione
software.
| Per la connessione di base non servono altri pin, ma può essere
necessario disporne, in quanto alcune periferiche hanno funzioni
addizionali, come un reset e/o in una uscita di interrupt, che sarà
necessario gestire separatamente dal modulo MSSP. |
Siccome la comunicazione I2C
è costituita dalla trasmissione sincrona di dati e clock separati, il
prototipo della periferica è, come per SPI, uno shift register.
Però il bus I2C
prevede una gestione di stati di acknowledgement, oltre alla trasmissione
bidirezionale dei dati su un solo conduttore. Inoltre la selezione della
periferica è effettuata con un indirizzo.
Queste condizioni fanno si che la struttura dello shift register di base sia
accompagnata da una complessa logica.
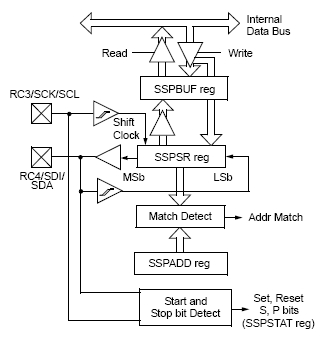 |
Le operazioni di scrittura e lettura non sono effettuate sullo
shift regster SSPSR, ma sul buffer intermedio SSPBUF,
colleganto
con il bus dati interno.
Le condizioni di scrittura o lettura abilitano i buffer che
collegano il registro per l' una o per l' altra operazioneIl
dato ricevuto viene copiato nel registro SSPSR che può essere
comparato con il contenuto del registro SSPADD in cui il
programmatore avrà caricato l' indirizzo attribuito al
microcontroller quando è in modo Slave. Il risultato della
comparazione va ad attivare un flag.
Nel modo Master il registro contiene invece le informazioni relative
al Baud Rate Generator.
A questo proposito dobbiamo ricordare che il clock sul bus è
fornito dall' unità Master che sta trasmettendo in quel momento.
|
Riveste particolare importanza la logica che permette di monitorare
in continuazione lo stato delle linee SDA e SCL e rilevare
automaticamente le condizioni di Start e Stop.
Il clock in trasmissione è derivato dall' oscillatore primario (Fosc/4) e,
per i PIC 18F con clock a 40 MHz può arrivare a 400 kHz, quindi sono eseguibili
trasferimenti dati nei modi standard e fast. E' possibile generare anche un
clock a 1MHz per il modo Fast plus, ma va detto che la documentazione
Microchip indica una non completa aderenza alle specifiche di temporizzazione
di I2C per clock maggiori di 300 kHz. Questo normalmente non crea
alcun problema, dato che i componenti I2C hanno tolleranze
sufficienti per assorbire eventuali differenze su segnali e clock, ma,
sostanzialmente, indica nel modo Standard a 100 kHz il compromesso più
sicuro.
Va comunque tenuto presente che la massima frequenza realmente raggiungibile dipende
dalle caratteristiche del bus e delle periferiche collegate.
Il modo High Speed a 3.4MHz non è eseguibile da parte dell' MSSP
standard,
anche in relazione al fatto che il protocollo, per questa modalità, presenta
differenze rispetto agli altri modi, oltre a richiedere ai pin del bus un
hardware differente.
