Funzioni particolari
La manipolazione delle linee SDA e SCL consente di introdurre alcune
condizioni speciali che aumentano la flessibilità e l' efficienza del bus.
Sono:
- clock stretching
- clock synchronization
- arbitraggio
CLOCK STRETCHING
Una delle caratteristiche più significative del protocollo è il clock
stretching (letteralmente "allungamento del clock"). Questa azione
ha lo scopo di dare ai dispositivi "lenti" abbastanza tempo per
rispondere.
Se un dispositivo è lento, è possibile che occorra un certo tempo prima
di aver elaborato il dato ricevuto; in questo caso la periferica Slave è
autorizzata a portare a livello basso la linea SCL e a mantenerla a questo
livello fino a che è necessario, indicando che non è ancora pronta per elaborare i
altri dati.
Da parte sua il Master, rilasciando la linea del clock, dovrà
verificare che essa ritorni effettivamente a livello alto per via dei
pull-up; se questo non succede è indice che lo Slave sta chiedendo più
tempo. Ne deriva che il Master arresta le operazioni fino a che SCL non viene
rilasciata (questo è possibile perchè, ricordiamo, le linee del bus sono
open drain - open collector e vanno a livello alto attraverso i pull-up).
Anche se il Master può tenere la linea SCL a livello basso come desidera, il termine
"clock stretching" è normalmente utilizzato solo quando l' azione
è eseguita da uno Slave.
Il clock stretching è l' unico momento in cui uno Slave può manipolare la
linea SCL.
Se su un bus nessun dispositivo può richiedere il clock stretching,
il Master non ha necessità di controllare questa funzione.
A livello di bit, in teoria qualsiasi impulso di clock può essere
allungato, come nel caso in cui il clock del Master sia troppo rapido per lo
Slave. A livello di byte, un dispositivo può essere in grado di ricevere
un dato, ma richiedere tempo per elaborarlo e quindi operare un clock stretching
dopo l' ACK con lo scopo di arrestare la trasmissione del Master per il tempo
necessario. In modo High Speed il clock stretching è ammesso solo a livello
di byte.
Alcuni dispositivi non hanno la possibilità di supportare il clock
stretching e potranno essere indicati come "2-wires interface" e non
come I²C puri.
Da notare che, per garantire un transfer rate minimo, SMBus pone dei limiti
alla lunghezza del clock e i dispositivi non possono bloccare il bus oltre un
certo tempo.
Clock synchronization
Due Master possono iniziare a trasmettere contemporaneamente sul bus inattivo.
E' evidente che questa circostanza è inaccettabile, in quanto la trasmissione
dei dati sarebbe corrotta dall' accesso contemporaneo di due unità che
cercano di inviare bit differenti. Occorre, quindi, un sistema di arbitraggio per decidere
quale unità prenderà il controllo del bus e completerà la sua trasmissione.
Questa operazione è svolta dal clock synchronization e dall'arbitraggio.
Ovviamente se sul bus è presente un solo Master, queste funzioni non sono
necessarie.
La sincronizzazione del clock si basa sulla linea SCL che è un wired-AND
di open collector-open drain.
Tutti i Master generano il proprio clock e i dati sono validi durante il
periodo di livello alto del clock.
E' possibile che i clock di diversi Master siano differenti ed è necessario
per l' arbitraggio, che procede bit per bit, che i clock siano uguali.
Il diagramma rende graficamente la situazione.
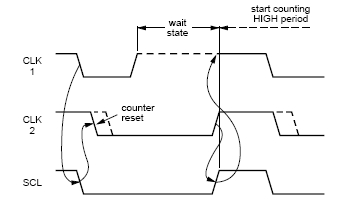 |
La transizione da livello alto a livello basso della linea SCL causerà
da parte dei Master un conteggio basato sul proprio periodo di clock.
Se il Master rilascia SCL, ma la linea non ritorna a livello alto,
questo significa che un altro Master la sta impegnando. Non si può cambiare lo stato della linea di SCL se un altro
clock la sta tenendo a livello basso; quindi SCL resterà a livello
basso per il periodo del clock più lento, mentre il Master con il
periodo più breve porterà il suo switch della linea SCL ad alta
impedenza e aspetterà in wait state. |
Quando tutti i master interessati hanno esaurito il loro conteggio del periodo
a livello basso, la linea di clock sarà rilasciata e andrà a livello alto. Non ci sarà quindi alcuna differenza tra
i clock dei Master e lo stato della linea SCL; tutti i Master inizieranno a contare i loro periodi
di livello alto nello stesso momento. Il primo Master che completa il suo periodo,
costringerà nuovamente la linea SCL basso. In questo modo viene generato un
clock SCL sincronizzato nel periodo a livello basso, determinato dal Master con il più lungo periodo di
livello basso e il periodo a livello alto determinato da quello con il più breve periodo
a livello alto.
Arbitraggio
L' arbitraggio, come la sincronizzazione del clock, si riferisce ad una porzione del protocollo richiesto solo se verrà
utilizzato più di un Master nel sistema. Gli Slave non sono coinvolti in
queste procedure.
Un Master può iniziare un trasferimento solo se il bus è libero, ovvero
entrambe le linee a livello alto, sostenute dai pull-up. Il Master che rileva il bus libero
genererà una condizione di Start entro il tempo minimo di attesa
stabilito dalle specifiche (tHD; STA); però è possibile che due Master
cerchino di accedere al bus nello stesso momento: l'arbitraggio è quindi
necessario per determinare quale Master prenderà il controllo. L'
arbitraggio procede bit per bit: durante ogni bit, mentre SCL è a livello alto, ogni
Master controlla il livello di SDA per vedere se corrisponde a quello che ha inviato. Questo processo potrebbe richiedere
un certo numero di bit: i Master sono effettivamente in grado di completare un'intera transazione senza errore, fintanto che il
dato trasmesso è identico, ma se il Master 1 tenta di inviare un
livello alto mentre l' altro invia un livello basso, sa che ha perso l'arbitrato e
disconnette il driver di uscita SDA, mentre il Master 2 va a completare la transazione. Nessuna informazione viene persa durante il processo di
arbitraggio.
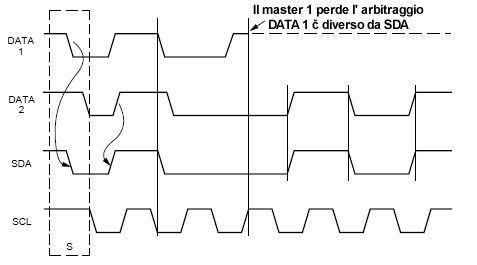 |
Un Master che perde l'arbitraggio può generare impulsi di clock fino alla fine del byte in cui perde
l'arbitraggio e dovrà riavviare la transazione quando il bus sarà
libero.
Se un Master incorpora anche una funzione di Slave e perde l' arbitraggio durante la fase di
indirizzamento, è possibile che il Master vincente stia cercando di
indirizzarlo; il Master perdente deve quindi passare immediatamente alla sua modalità di
Slave |
Siccome il controllo del bus è deciso esclusivamente sull'indirizzo e i dati inviati dai
Master concorrenti, il protocollo non prevede alcun Master a livello superiore, né alcun ordine di priorità sul bus.
Di conseguenza si potrebbero verificare condizioni non definite nelle seguenti
situazioni:
- Un Master invia una condizione di Restart mentre un'altro sta inviando bit di dati.
- Un Master invia una condizione di STOP e l' altro sta inviando dati.
- Un Master invia una condizione di Restart e l' altro invia uno Stop
Auto incremento
Dispositivi I2C dotati di un'area dati di dimensioni consistenti, come RAM
o EEPROM o Flash, implementano un automatismo per cui il dispositivo mantiene
un puntatore interno che viene incrementato automaticamente su dati da leggere o scrivere;
questa funzione che può essere impostato manualmente oppure interamente
automatica. Questo è utile per acedere ad una succesione di dati in modo
ordinato ed efficiente.
L' incremento automatico non è parte dello standard I2C, ma è una caratteristica comune in molti dispositivi I2C.
Una tipica sessione di comunicazione è questa:
- Il Master invia una condizione di Start
- Segue un byte dell'indirizzo dello Slave con il bit di lettura/scrittura
in modo da impostare il il puntatore dell'auto incremento
- Se la funzione è supportata, il Master invia il dato di auto incremento
- Il Master invia una condizione di Restart per leggere dati a partire da posizione
iniziale dell' area puntata
- Il Master invia un byte dell'indirizzo a cui accedere
- e legge/scrive un numero arbitrario di byte dal dispositivo: la caratteristica
auto incremento fa si che il puntatore interno, ad ogni accesso, sia
modificato, permettendo di accedere a byte consecutivi senza ulteriori
invii di indirizzo
- Terminato il trasferimento, il Master rilascia il bus con una condizione
di Stop
Ovviamente sarà necessario consultare i fogli dati dei singoli dispositivi
per verificare la possibilità di auto incremento e i le relative operazioni
necessarie.
Rilevamento degli elementi sul bus e auto
configurazione
Utilizzando, ad esempio, il byte di Start è possibile implementare
sistemi di identificazione delle periferiche sul bus e modalità di auto
configurazione del sistema molto complessi. La sequenza tipica è
- < Indirizzo primario > + W
- <byte di Start 00000001>
- < Indirizzo secondario >
- < DeviceType> < Sensor String > < Indirizzo Sensore >
Sono classificabili i DeviceType, che contiene la descrizione della classe
di appartenenza del dispositivo (ad esempio Sensori, battery manager,
dispositivi di comunicazione, GPS, terminatori, ecc) e i SensorString, che
contengono le specifiche del sensore (temperatura, pressione, velocità,
umidità, ecc) in modo da permettere al un Master di configurazione di operare
una configurazione dinamica del bus
| 